HU
16
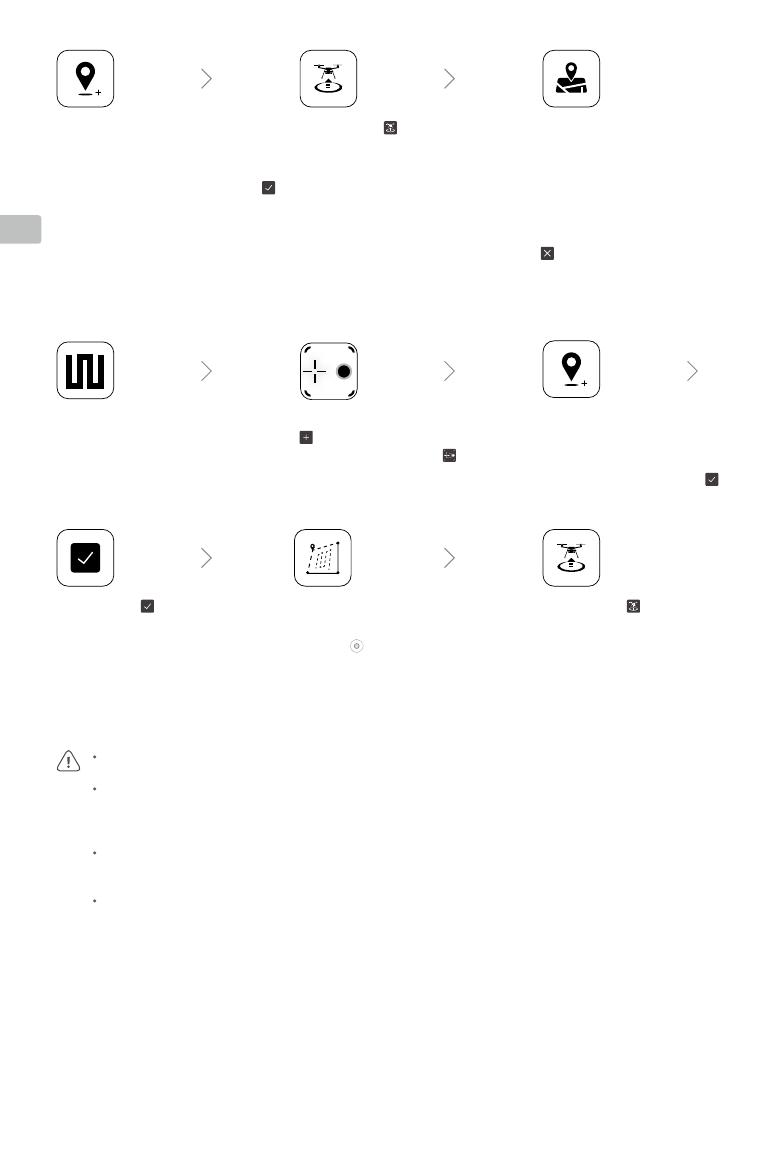
Mező tervezése és művelet végrehajtása
Húzza el a térképet, és koppintson
a Hozzáadás gombra, hogy pontot
adjon hozzá a hajszálvonal-hálózatos
lemez pozíciójához. Koppintson a
gombra a mentéshez.
Koppintson a gombra,
és mozgassa a csúszkát a
felszálláshoz. A repülőgép
automatikusan elvégzi út
közben a leképezési műveletet.
Várja meg, amíg a
rekonstrukció befejeződik.
A rekonstrukció eredménye
megjelenik az eredeti
térképen.
A rekonstrukció után koppintson a Mező tervezése elemre, és kövesse az alábbi rész 3–6. lépéseit a pontok
hozzáadásához, és a műveletek végrehajtásához. A felhasználó rákoppinthat a gombra az aktuális kijelölés
megszakításához és az új leképezési művelet elindításához.
Az Üzemeltetési nézetben
koppintson a bal felső sarokban
található Üzemmód gombra, és
válassza a Mezőgazdaság panel
Útvonal elemét.
Húzza el a térképet, és
koppintson a Hozzáadás elemre,
hogy hozzáadjon egy pontot
a térképhez. Koppintson a
gombra a mentéshez.
Koppintson a
lehetőségre a mező
használatához.
Állítsa be a feladat és
az útvonal paramétereit,
húzza a lehetőséget az
útvonal repülési irányának
beállításához, és mentse el.
Koppintson a gombra,
ellenőrizze a repülőgép
állapotát és a feladat
beállításait, majd mozgassa
a csúszkát a felszálláshoz.
A repülőgép automatikusan
elvégzi a műveletet.
Koppintson a jobb alsó sarokban lévő
gombra, és koppintson a jobb oldali
képernyő közepén lévő lehetőségre,
majd válassza a Hajszálvonal-hálózatos
lemez lehetőséget, és válassza ki a
pont típusát.
Csak nyílt területeken szálljon le, és az üzemi környezetnek megfelelően állítsa be a megfelelő csatlakozási útvonalat és
az RTH magasságot.
A műveleteket a vezérlő botkormány enyhe mozgatásával tudja szüneteltetni. A repülőgép lebegni fog, és rögzíti a
töréspontot. Ezt követően a repülőgép manuálisan vezérelhető. A folytatáshoz válassza ki ismét a műveletet. A repülőgép
automatikusan visszatér a törésponthoz, és folytatja a műveletet. Ügyeljen a repülőgép biztonságára, amikor visszatér
egy töréspontra.
Útvonal üzemmódban a repülőgép képes megkerülni az akadályokat, amelyek alapértelmezés szerint le vannak tiltva,
ezek engedélyezhetők az alkalmazásban. Ha a funkció engedélyezve van, és a repülőgép akadályokat észlel, a repülőgép
lelassul, és megkerüli az akadályokat, majd visszatér az eredeti repülési útvonalra.
A felhasználó az alkalmazásban beállíthatja a műveletet, amelyet szeretne, hogy a repülőgép elvégezzen, miután az
aktuális művelet befejeződött.
További üzemmódok és funkciók
Az A-B útvonal, Manuális, Manuális Plus és a Gyümölcsfa üzemmódokkal, valamint a Csatlakozási útvonal,
Üzemeltetés újrakezdése, Rendszeradatok védelme és az Üres tartály funkciók használatával kapcsolatos
további információkért olvassa el a kézikönyvet.
Karbantartás
Tisztítsa meg a repülőgép és a távirányító minden részét a szórási nap végén, miután a repülőgép visszatér a
normál hőmérsékletre. NE tisztítsa a repülőgépet azonnal a műveletek befejezése után.



















