Garmin Sistema de piloto automatico nautico GHP 10V Guida d'installazione
- Categoria
- Dock station per dispositivi mobili
- Tipo
- Guida d'installazione

Istruzioni di installazione di GHP 10V 1
Per ottenere le massime prestazioni possibili ed evitare danni all'imbarcazione,
installare il pilota automatico GHP 10V Garmin
®
in base alle istruzioni riportate
di seguito. Si consiglia vivamente la consulenza di un installatore certicato per
l'installazione del pilota automatico.
Il sistema GHP 10V è compatibile con i sistemi C3 o con i più recenti sistemi
EVC Volvo
®
. Per ulteriori informazioni sull'aggiornamento dei sistemi EVC
precedenti, contattare Volvo.
Leggere le istruzioni di installazione prima di procedere all'installazione.
In caso di difcoltà durante l'installazione, contattare il servizio di assistenza
Garmin.
NOTA: nell'ultima pagina di queste istruzioni è disponibile un elenco di controllo
per l'installazione. Rimuovere l'ultima pagina e consultare l'elenco di controllo
mentre si procede con l'installazione del sistema GHP 10V.
È possibile ottenere assistenza eseguendo la registrazione in linea.
• Visitare il sito Web http://my.garmin.com.
• Conservare in un luogo sicuro la ricevuta di acquisto originale oppure una
fotocopia.
Per necessità di assistenza future, scrivere il numero di serie assegnato a ciascun
componente del sistema GHP 10V negli appositi spazi a pagina 3. I numeri di
serie sono riportati sull'etichetta adesiva apposta su ciascun componente.
Per informazioni sull'utilizzo del sistema GHP 10V, contattare il servizio di
assistenza Garmin.
Negli Stati Uniti, visitare il sito Web www.garmin.com/support oppure contattare
Garmin USA al numero (913) 397.8200 o (800) 800.1020.
Nel Regno Unito, contattare Garmin (Europe) Ltd. al numero 0808 2380000.
In Europa, visitare il sito Web www.garmin.com/support e fare clic su Contact
Support per informazioni sull'assistenza nazionale oppure contattare Garmin
(Europe) Ltd. al numero +44 (0) 870.8501241.
L'utente ha la responsabilità di navigare in modo sicuro e prudente la
propria imbarcazione. Il sistema GHP 10V è uno strumento in grado di
migliorare le capacità di navigazione con l'imbarcazione, ma non esime l'utente
dalla responsabilità di condurre in modo sicuro e prudente l'imbarcazione.
Durante la navigazione, evitare le zone pericolose e non lasciare mai il timone
incustodito.
Tenersi sempre pronti a riprendere il controllo manuale del timone
dell'imbarcazione in modo tempestivo.
Apprendere le modalità d'uso del sistema GHP 10V in acque calme e tranquille.
Usare cautela durante l'uso del sistema GHP 10V vicino a elementi di rischio in
acqua, come moli, piloni e altre imbarcazioni.
Per avvisi sul prodotto e altre informazioni importanti, consultare la guida
Informazioni importanti sulla sicurezza e sul prodotto inclusa nella confezione.
È necessario che il dispositivo da collegare a questo prodotto sia dotato o venga
fornito con un involucro ignifugo.
Durante le operazioni di trapanatura, taglio o carteggiatura, indossare degli
occhiali protettivi, una maschera antipolvere e un'adeguata protezione per l'udito.
AvvertenzA
Prima di effettuare operazioni di trapanatura o taglio, vericare sempre il lato
opposto della supercie da tagliare. Fare attenzione a serbatoi di carburante, cavi
elettrici e tubi idraulici.

2 Istruzioni di installazione di GHP 10V
Registrazione del dispositivo .....................................................................1
Contattare Garmin .....................................................................................1
Informazioni importanti sulla sicurezza......................................................1
Componenti principali ................................................................................3
CCU ...................................................................................................................3
Gateway del pilota automatico ...........................................................................3
GHC 20 ..............................................................................................................3
Cavi e connettori........................................................................................3
Cavo di interconnessione dell'unità CCU ...........................................................3
Allarme ...............................................................................................................3
Cavo dati NMEA 0183 dell'unità GHC 20........................................................... 3
Cavi e connettori NMEA 2000 ............................................................................4
Strumenti necessari ...................................................................................4
Indicazioni di montaggio e collegamento...................................................5
Indicazioni di montaggio dell'unità CCU.............................................................5
Indicazioni di collegamento dell'unità CCU ........................................................5
Indicazioni di montaggio dell'allarme ................................................................ 5
Indicazioni di collegamento dell'allarme ............................................................. 5
Indicazioni di collegamento della rete NMEA 2000 ............................................5
Indicazioni di montaggio del dispositivo GHC 20 ...............................................5
Indicazioni di collegamento del dispositivo GHC 20 ..........................................5
Installazione dell'unità CCU .......................................................................7
Installazione della staffa di montaggio dell'unità CCU .......................................7
Fissaggio dell'unità CCU nella staffa ................................................................. 7
Collegamento dell'unità CCU .............................................................................7
Installazione dell'allarme ....................................................................................7
Montaggio dell'allarme .......................................................................................7
Collegamento dell'allarme .................................................................................. 7
Installazione del gateway del pilota automatico ........................................7
Montaggio del gateway del pilota automatico ....................................................7
Collegamento del gateway del pilota automatico ...............................................8
Installazione del dispositivo GHC 20 .........................................................8
Montaggio dell'unità GHC 20 .............................................................................8
Collegamento del dispositivo GHC 20 ............................................................... 8
Indicazioni su più dispositivi GHC 20 .................................................................8
Collegamento dei dispositivi alla rete NMEA 2000 ....................................9
Collegamento del dispositivo GHC 20 a una rete NMEA 2000 esistente ..........9
Collegamento dell'unità CCU a una rete NMEA 2000 esistente ........................ 9
Congurazione di una rete NMEA 2000 di base per le unità GHC 20
e CCU ........................................................................................................10
Collegamento di dispositivi opzionali al sistema di pilota automatico
GHP 10V...............................................................................................10
Indicazioni di collegamento della rete NMEA 0183 ..........................................10
Collegamento di un dispositivo opzionale compatibile con NMEA 0183 al
dispositivo GHC 20 ....................................................................................10
Informazioni sulla procedura Sea Trial Wizard ........................................ 11
Indicazioni importanti sulla procedura Sea Trial Wizard .......................... 11
Avvio della procedura Sea Trial Wizard ................................................... 11
Esecuzione della procedura Sea Trial Wizard ......................................... 11
Congurazione dei giri di planata ..................................................................... 11
Calibrazione della bussola ............................................................................... 11
Esecuzione della procedura di messa a punto automatica .............................. 11
Impostazione del nord ...................................................................................... 11
Impostazione della regolazione precisa della direzione ................................... 11
Valutazione dei risultati della congurazione del pilota automatico ......... 11
Verica e regolazione della congurazione del pilota automatico .................... 12
Regolazione delle impostazioni del limitatore dell'accelerazione.....................12
Regolazione delle impostazioni di guadagno del pilota automatico .................12
Procedura di congurazione avanzata ....................................................12
Attivazione della procedura di congurazione avanzata ..................................12
Impostazioni di congurazione avanzata.................................................12
Esecuzione manuale delle procedure di congurazione automatica ............... 12
Esecuzione manuale della procedura Sea Trial Wizard ..................................12
Denizione manuale delle singole impostazioni di congurazione .................. 12
Schemi di collegamento della rete NMEA 0183 ......................................13
Speciche ................................................................................................14
Informazioni su PGN NMEA 2000 ...........................................................14
CCU ................................................................................................................. 14
GHC 20 ............................................................................................................14
Informazioni sullo standard NMEA 0183 .................................................15
Impostazioni di congurazione del sistema GHP 10V .............................15
Messaggi di errore di attenzione .............................................................16
Modello di montaggio dell'unità CCU ......................................................17
Lista di controllo per l'installazione del sistema GHP 10V .......................19

Istruzioni di installazione di GHP 10V 3
Il sistema di pilota automatico GHP 10V è costituito da vari componenti,
ognuno venduto separatamente. Si consiglia di acquisire dimestichezza con tutti
i componenti prima di iniziare l'installazione. Per installare correttamente il
prodotto sull'imbarcazione, è necessario conoscere il modo in cui i componenti
interagiscono e si collegano fra loro.
Man mano che si familiarizza con i componenti del sistema GHP 10V, assicurarsi
che la confezione contenga tutti gli elementi indicati di seguito. In assenza di uno
o più componenti, contattare immediatamente il proprio rivenditore Garmin.
Registrare il numero di serie di ciascun componente nello spazio fornito.
Il sistema di pilota automatico GHP 10V è costituito da tre componenti
principali, l'unità del computer di rotta (CCU), il gateway del pilota automatico e
l'interfaccia di controllo utente GHC
™
10.
L'unità CCU funge da "cervello" del sistema GHP 10V. L'unità CCU contiene
il sensore utilizzato per stabilire la direzione dell'imbarcazione. L'unità CCU
viene collegata al gateway del pilota automatico con un unico cavo. Inoltre,
l'unità CCU, si collega a una rete NMEA 2000
®
per comunicare con il dispositivo
GHC 20 e a dispositivi GPS opzionali certicati NMEA 2000 (pagina 9).
Il gateway del pilota automatico consente al sistema GHP 10V di governare
l'imbarcazione tramite il sistema di sterzo Volvo
™
. Il gateway del pilota
automatico si collega all'unità CCU tramite il cavo di interconnessione dell'unità
CCU e al sistema Volvo mediante un connettore proprietario Volvo.
Il dispositivo GHC 20 è l'interfaccia primaria utilizzata per l'attivazione del
sistema di pilota automatico GHP 10V. Utilizzando il dispositivo GHC 20, è
possibile attivare o gestire la direzione di navigazione con il pilota GHP 10V.
Inoltre, si imposta e si personalizza il sistema GHP 10V.
Il dispositivo GHC 20 si collega a una rete NMEA 2000 per comunicare con
l'unità CCU. Il dispositivo GHC 20 si collega inoltre a dispositivi opzionali
compatibili con NMEA 2000, ad esempio un dispositivo GPS, per utilizzare
le funzioni avanzate del sistema GHP 10V. Se non si dispone di dispositivi
compatibili con NMEA 2000 è possibile, in alternativa, collegare il dispositivo
GHC 20 a dispositivi opzionali compatibili con NMEA 0183.
Il sistema di pilota automatico GHP 10V comprende più cavi. I cavi collegano
i componenti tra loro, all'alimentazione, a un allarme, nonché a dispositivi
opzionali.
AvvertenzA
Non collegare questo cavo a una rete NMEA 2000.
Il cavo collega l'unità CCU al gateway del pilota automatico. All'interno del cavo
sono contenuti i seguenti li colorati. Questi li collegano l'unità CCU all'allarme
e al cavo giallo del dispositivo GHC 20.
L'allarme genera avvisi acustici dal sistema GHP 10V (pagina 7).
Questo cavo collega il GHC 20 al cavo giallo della CCU e alla stessa terra
dell’ECU. È possibile utilizzare questo cavo anche per collegare il dispositivo
GHC 20 a dispositivi opzionali compatibili con NMEA 0183 (pagina 10).

4 Istruzioni di installazione di GHP 10V
I cavi NMEA 2000 collegano le unità CCU e GHC 20 alla rete NMEA 2000.
Collegare l'unità CCU e il dispositivo GHC 20 a una rete NMEA 2000 esistente
tramite i connettori a T e i cavi di derivazione in dotazione o utilizzare tutti i cavi
e i connettori NMEA 2000 in dotazione per congurare una rete NMEA 2000
sull'imbarcazione, se necessario (pagina 9).
➊
➋
➌ ➍ ➎
➊
Cavo di derivazione NMEA 2000, 2 m (6 piedi) (×2)
➋
Cavo di alimentazione NMEA 2000
➌
Connettore a T NMEA 2000 (x3)
➍
Terminatore NMEA 2000, maschio
➎
Terminatore NMEA 2000, femmina
Se necessario, sono disponibili prolunghe NMEA 2000. Per informazioni sulle
modalità dell'ordine, contattare il rivenditore Garmin di zona o il servizio di
assistenza Garmin.
• Occhiali di sicurezza
• Trapano e punte da trapano
• Fresa a tazza da 90 mm (3
1
/
2
poll.)
• Pinze tagliali/spelacavi
• Cacciaviti: Phillips e a lama piatta
• Fascette
• Connettori impermeabili per cavo (dadi per cavo) o guaina termoretraibile e
pistola termica
• Sigillante marino
• Bussola palmare (per vericare la presenza di campi magnetici quando si
stabilisce la posizione ideale per l'installazione dell'unità CCU)
• Lubricante antigrippaggio (opzionale)
NOTA: le viti di montaggio per il dispositivo GHC 20 e l'unità CCU sono fornite
in dotazione. Se le viti fornite non sono adatte alla supercie di montaggio, è
necessario procurarsi le viti appropriate.

Istruzioni di installazione di GHP 10V 5
Prima di installare il sistema di pilota automatico GHP 10V, è importante
conoscere bene la posizione di tutti i componenti sull'imbarcazione. Collocare
temporaneamente tutti i componenti nel punto previsto per l'installazione.
Leggere queste indicazioni prima di iniziare a pianicare l'installazione.
NOTA: nell'ultima pagina di queste istruzioni è disponibile un elenco di controllo
per l'installazione. Rimuovere l'ultima pagina e consultare l'elenco di controllo
mentre si procede con l'installazione del sistema GHP 10V.
I componenti del sistema GHP 10V vengono collegati tra loro e all'alimentazione
mediante i cavi forniti in dotazione. Prima di effettuare qualsiasi operazione di
montaggio o collegamento, assicurarsi che i cavi corretti raggiungano ciascun
componente e che i componenti si trovino in una posizione accettabile.
• Montare l'unità CCU nella parte anteriore dell'imbarcazione, ad
un'altezza non superiore a 3 metri (10 piedi) rispetto al livello dell'acqua.
• Non montare l'unità CCU in una posizione in cui potrebbe venire sommersa
o bagnata.
• Non montare l'unità CCU nelle vicinanze di materiale ferromagnetico,
magneti (altoparlanti e motori elettrici) o cavi ad alta tensione.
• L'unità CCU deve essere distante almeno 0,6 m (24 poll.) da interferenze in
grado di spostare o modicare il campo magnetico, come ancore, catene di
ancore, motori per tergicristalli e quadri strumenti.
• Utilizzare una bussola palmare per vericare l'assenza di interferenze
magnetiche nell'area in cui deve essere montata l'unità CCU.
Se la bussola palmare non punta verso il nord quando ci si trova nel
punto in cui si intende montare l'unità CCU, ciò signica che è presente
un'interferenza magnetica. Scegliere un'altra posizione e riprovare.
• È possibile montare l'unità CCU al di sotto del livello dell'acqua, se non si
trova in posizione tale da rischiare di venire sommersa o bagnata.
• Montare la staffa dell'unità CCU su una supercie verticale o sotto una
supercie orizzontale, in modo che i cavi elettrici collegati escano verso il
basso.
• Le viti di montaggio sono incluse con l'unità CCU, ma potrebbe essere
necessario utilizzare viti diverse se quelle fornite non sono adatte alla
supercie di montaggio.
• Il cavo di interconnessione dell'unità CCU consente di collegare l'unità CCU
al gateway del pilota automatico mediante un cavo di 3 m (9,5 piedi).
◦ Se non è possibile montare l'unità CCU entro 3 m (9,5 piedi) dal gateway
del pilota automatico, è possibile utilizzare i cavi NMEA 2000 come
prolunga.
◦ Il cavo di interconnessione dell'unità CCU non deve essere tagliato.
• Il cavo di interconnessione dell'unità CCU collega l'unità CCU al dispositivo
GHC 20 con un unico conduttore giallo (pagina 7). Il sistema di pilota
automatico non viene alimentato se non viene eseguito questo collegamento.
• Montare l'allarme in plancia vicino al timone.
• È possibile montare l'allarme sotto il cruscotto.
• Se necessario, è possibile prolungare i cavi dell'allarme tramite un cavo
28 AWG (0,08 mm
2
).
• L'unità CCU e il dispositivo GHC 20 sono collegati alla rete NMEA 2000.
Se l'imbarcazione non è dotata di una rete NMEA 2000, è possibile
congurarne una tramite i cavi e i connettori NMEA 2000 in dotazione
(pagina 10).
• Per utilizzare le funzioni avanzate del sistema GHP 10V, è possibile collegare
dispositivi opzionali compatibili con NMEA 2000, quali un dispositivo GPS
alla rete NMEA 2000.
AvvertenzA
La supercie di montaggio deve essere piana per evitare danni al dispositivo una
volta installato.
• È necessario che la posizione di montaggio garantisca una visualizzazione
ottimale durante la navigazione.
• La posizione di montaggio deve consentire di utilizzare facilmente i tasti del
dispositivo GHC 20.
• È necessario che la supercie di montaggio sia sufcientemente robusta
da sostenere il peso del dispositivo GHC 20 e proteggerlo da vibrazioni
eccessive o urti.
• L'area retrostante la supercie deve lasciare spazio per il passaggio e il
collegamento dei cavi.
Occorre lasciare uno spazio di almeno 8 cm (3 poll.) dietro il dispositivo
GHC 20.
• La posizione deve trovarsi a una distanza di 209 mm (8
1
/
4
poll.) da una
bussola magnetica per evitare possibili interferenze.
• La posizione deve trovarsi in un'area non esposta a temperature estreme
(pagina 14).
• È necessario collegare il dispositivo GHC 20 alla rete NMEA 2000.
• Per utilizzare il pilota automatico, è necessario collegare correttamente due
li del cavo dati del dispositivo GHC 20:
◦ Collegare il lo giallo del cavo dati del dispositivo GHC 20 al lo giallo
del cavo di interconnessione dell'unità CCU.
◦ Collegare il lo nero del cavo dati del dispositivo GHC 20 alla stessa
massa dell'unità CCU.
• Al cavo dati del dispositivo GHC 20, è possibile collegare dispositivi
opzionali compatibili con NMEA 0183, ad esempio un dispositivo GPS
(pagina 10).

6 Istruzioni di installazione di GHP 10V
➊
➋
➌
➍
➎
➑
➐
➏
➊
GHC 20
➋
Cavo dati del
dispositivo GHC 20
Instradare il lo giallo verso il punto in cui si desidera installare il dispositivo GHC 20 (pagina 8).
➌
Rete NMEA 2000 Collegare il dispositivo GHC 20 e l'unità CCU alla rete NMEA 2000 tramite i connettori a T in dotazione (pagina 9).
Se non è già presente una rete NMEA 2000 sull'imbarcazione, è necessario congurarne una tramite i cavi e i connettori forniti
(pagina 10).
➍
Cavo di alimentazione
NMEA 2000
Installare il cavo solo se si sta congurando una rete NMEA 2000. Non installare il cavo se è già presente una rete NMEA 2000
sull'imbarcazione (pagina 10).
È necessario che il cavo di alimentazione NMEA 2000 sia collegato a una fonte di alimentazione da 9–16 V cc.
➎
CCU Montare l'unità CCU con i cavi pendenti in basso (pagina 7).
➏
Cavo di alimentazione
dell'unità CCU
È possibile collegare l'unità CCU a una fonte di alimentazione da 12–24 V cc. È necessario collegare il lo nero del cavo dati del
dispositivo GHC 20 alla stessa massa di questo cavo (pagina 8).
➐
Cavo di
interconnessione
dell'unità CCU
Per far sì che il pilota automatico si accenda, è necessario collegare il lo giallo di questo cavo al lo giallo del cavo dati del
dispositivo GHC 20.
Collegare i li blu e arancione di questo cavo all'allarme (pagina 7).
➑
Gateway del pilota
automatico GHP 10V

Istruzioni di installazione di GHP 10V 7
Una volta pianicata l'installazione del sistema GHP 10V sull'imbarcazione e
dopo aver osservato tutte le indicazioni a livello di montaggio e collegamento, è
possibile iniziare a montare e collegare i componenti.
Per installare l'unità CCU, è necessario montarla sull'imbarcazione (pagina 7),
collegarla al gateway del pilota automatico (pagina 7), collegarla a una rete
NMEA 2000 (pagina 9), quindi collegarla all'allarme (pagina 7) e al conduttore
giallo dell'unità CCU sul dispositivo GHC 20 (pagina 7).
Per poter montare l'unità CCU, è necessario scegliere una posizione e stabilire gli
accessori di montaggio corretti (pagina 5).
La staffa dell'unità CCU è suddivisa in due parti, una per il montaggio e una per
il ssaggio.
1. Ritagliare il modello di montaggio riportato a pagina 17.
2. Utilizzando del nastro adesivo, ssare il modello sulla posizione di
montaggio.
Se si installa l'unità CCU su una supercie verticale, installare il supporto
della staffa con l'apertura
➊
nella parte inferiore.
➊
➋
3. Praticare i fori di riferimento nei tre punti di montaggio.
4. Utilizzare le viti
➋
per ssare il supporto della staffa dell'unità CCU.
1. Collegare il cavo di interconnessione
dell'unità CCU e il cavo di derivazione
NMEA 2000 all'unità CCU.
2. Posizionare l'unità CCU nel supporto
della staffa dell'unità CCU con i cavi
pendenti in basso
➊
.
3. Posizionare la parte per il ssaggio
della staffa sulla sfera e farla scattare in
posizione all'interno del supporto della
staffa, cominciando dai due bracci
➋
privi della vite zigrinata
➌
.
4. Con i cavi pendenti verso il basso,
collegare il braccio con la vite zigrinata.
Per una corretta lettura della direzione
da parte dell'unità CCU, è necessario
che i cavi pendano verso il basso.
5. Avvitare a mano la vite zigrinata no a bloccare in posizione l'unità CCU
nella staffa.
Non serrare la vite zigrinata più del necessario.
1. Instradare l'estremità del connettore a cinque pin del cavo di interconnessione
dell'unità CCU no al punto in cui si desidera accedere al bus a connessione
multipla Volvo (pagina 7).
2. Collegare il cavo di interconnessione dell'unità CCU al gateway del pilota
automatico dopo aver installato il gateway.
3. Instradare i cavi iniziando dalla parte non rivestita del cavo verso il cavo di
interconnessione dell'unità CCU.
• Instradare i li arancione e blu verso la posizione in cui si desidera
installare l'allarme (pagina 7).
Se il cavo non è abbastanza lungo, utilizzare un cavo 28 AWG (,08 mm
2
)
come prolunga.
• Instradare il lo giallo verso il punto in cui si desidera installare il
dispositivo GHC 20 (pagina 8).
Se il cavo non è abbastanza lungo, utilizzare un cavo 22 AWG (,33 mm
2
)
come prolunga per il lo giallo.
4. Instradare i cavi rosso e nero verso la batteria, Questa è l'alimentazione
principale dell'unità CCU.
L'allarme segnala acusticamente all'utente gli eventi più importanti del sistema
GHP 10V.
Per installare l'allarme, è necessario montarlo sull'imbarcazione (pagina 7) e
collegarlo all'unità CCU (pagina 7).
Per poter montare l'allarme, è necessario scegliere una posizione di montaggio
(pagina 5).
Fissare l'allarme con fascette o altri accessori di montaggio appropriati (non
in dotazione).
1. Instradare il cavo dell'allarme verso l'estremità non rivestita del cavo di
interconnessione dell'unità CCU.
Se il cavo non è abbastanza lungo, utilizzare un cavo 28 AWG (,08 mm
2
)
come prolunga.
2. Collegare i cavi, in base alla tabella riportata di seguito.
Bianco (+) Arancione (+)
Nero (-) Blu (-)
3. Saldare e isolare tutti i cavi non rivestiti.
AvvertenzA
Non collegare il connettore dell'interfaccia CCU del cavo di interconnessione
dell'unità CCU o del gateway del pilota automatico a una rete NMEA 2000.
Il gateway del pilota automatico consente al sistema di pilota automatico
GHP 10V di comunicare con il sistema Volvo EVC e governare l'imbarcazione.
1. Montare il gateway del pilota automatico verso il punto in cui si desidera
accedere al bus multilink proprietario Volvo
e assicurarsi che il cavo di interfaccia Volvo raggiunga tale punto.
2. Fissare il gateway del pilota automatico con le fascette o altri accessori di
montaggio appropriati (non inclusi).
➊
➋
➌

8 Istruzioni di installazione di GHP 10V
1. Aprire il bus multilink Volvo e scollegare il cavo di breakout multilink.
2. Collegare il connettore proprietario Volvo
➊
dal gateway del pilota
automatico al bus multilink tramite il cavo a Y in dotazione.
➊
➋
3. Chiudere il bus multilink Volvo.
4. Collegare il connettore dell'interfaccia CCU
➋
al cavo dell'unità CCU.
Installare il dispositivo GHC 20 effettuando un montaggio a incasso nel
cruscotto vicino al timone, collegando il dispositivo al lo giallo del cavo di
interconnessione dell'unità CCU, quindi effettuando una connessione del sistema
alla rete NMEA 2000.
Per utilizzare le funzioni avanzate del sistema GHP 10V, collegare dispositivi
opzionali compatibili con NMEA 2000 o NMEA 0183, ad esempio un dispositivo
GPS alla rete NMEA 2000 o al dispositivo GHC 20 tramite la rete NMEA 0183.
AvvertenzA
L'intervallo di temperature per il dispositivo GHC 20 va da -15 °C a 70 °C
(da 5 °F a 158 °F). L'esposizione prolungata a temperature al di fuori di tale
intervallo (sia per la conservazione sia per il funzionamento) può causare danni
allo schermo LCD o ad altri componenti. Questo tipo di danni e le relative
conseguenze non sono coperti dalla garanzia limitata del produttore.
Se si monta il dispositivo GHC 20 su bra di vetro, per praticare i quattro fori
di riferimento, si consiglia di utilizzare una punta fresatrice per praticare una
svasatura attraverso lo strato di resina. In questo modo è possibile evitare crepe
prodotte dal serraggio delle viti nello strato di resina.
Le viti in acciaio inossidabile possono bloccarsi se vengono avvitate all'interno
della bra di vetro o serrate più del necessario. Prima dell'installazione, Garmin
raccomanda di applicare alle viti un lubricante antigrippaggio inossidabile.
Per poter montare il dispositivo GHC 20, è necessario scegliere una posizione di
montaggio (pagina 5).
1. Ritagliare il modello per il montaggio a incasso vericando che si adatti alla
posizione in cui si desidera montare il dispositivo GHC 20.
Il modello per il montaggio a incasso è incluso nella confezione del prodotto,
non in queste istruzioni.
Il modello per il montaggio a incasso dispone di una supercie adesiva sul
retro.
2. Rimuovere la protezione dall'adesivo sul retro del modello e applicarlo sulla
posizione in cui si desidera montare il dispositivo GHC 20.
3. Se, invece di una punta con fresa a tazza da 90 mm (3
17
/
32
poll.), si pratica il
foro con una sega, utilizzare una punta da trapano da 10 mm (
3
/
8
poll.) per
eseguire un foro di riferimento come indicato sul modello che consenta di
iniziare il taglio della supercie di montaggio.
4. Utilizzando la sega o una punta con fresa a tazza da 90 mm (3,5
poll.),
tagliare la supercie di montaggio seguendo l'interno della linea tracciata sul
modello per il montaggio a incasso.
5. Se necessario, utilizzare una lima e della carta abrasiva per rinire le
dimensioni del foro.
6. Posizionare il dispositivo GHC 20 sul ritaglio per vericare la corretta
posizione dei quattro fori di montaggio.
7. Selezionare un'opzione:
• Se i fori di montaggio sono posizionati correttamente, precedere al
passaggio 8.
• Se i fori di montaggio non sono posizionati correttamente, contrassegnare
le posizioni corrette dei quattro fori di montaggio.
8. Rimuovere il dispositivo GHC 20 dal ritaglio.
9. Praticare i quattro fori di riferimento da 2,8 mm (
7
/
64
poll.) .
Se si monta il dispositivo GHC 20 in bra di vetro, utilizzare una punta
fresatrice come indicato nell'avvertenza.
10. Rimuovere il resto del modello.
11. Posizionare la guarnizione inclusa sul retro del dispositivo
e applicare del sigillante marino intorno alla guarnizione per impedire che si
verichino fuoriuscite dietro la dashboard.
12. Posizionare il dispositivo GHC 20 nel foro.
13. Fissare saldamente il dispositivo GHC 20 alla supercie di montaggio tramite
le viti fornite.
Se si monta il dispositivo GHC 20 in bra di vetro, utilizzare un lubricante
antigrippaggio come indicato nell'avvertenza.
14. Far scattare la ghiera decorativa
➊
in posizione.
➊
Per utilizzare il sistema di pilota automatico, è necessario collegare due li del
cavo dati del dispositivo GHC 20 (giallo e nero):
1. Collegare il lo giallo del cavo dati del dispositivo GHC 20 al lo giallo del
cavo di interconnessione dell'unità CCU.
Se il cavo non è abbastanza lungo, utilizzare un cavo 22 AWG (,33 mm
2
)
come prolunga per il lo giallo.
2. Collegare il lo nero del cavo dati del dispositivo GHC 20 alla stessa massa
dell'unità CCU.
Se il cavo non è abbastanza lungo, utilizzare un cavo 22 AWG (,33 mm
2
)
come prolunga per il lo nero.
3. Saldare e isolare tutti i cavi non rivestiti.
È possibile installare più dispositivi GHC 20 (venduti separatamente) per
controllare il pilota automatico da diverse parti dell'imbarcazione.
• Tutti i dispositivi GHC 20 aggiuntivi devono essere collegati alla rete
NMEA 2000 (pagina 9).
• Per utilizzare un dispositivo GHC 20 aggiuntivo per accendere il pilota
automatico, collegare i li giallo e nero del dispositivo GHC 20 aggiuntivo
agli stessi li del dispositivo GHC 20 principale.
◦ Se si collegano dispositivi GHC 20 aggiuntivi per accendere il
pilota automatico, è necessario disattivarli tutti per spegnere il pilota
automatico.
◦ Se non si collega un dispositivo GHC 20 aggiuntivo per accendere il
pilota automatico, tale dispositivo entra in modalità standby quando il
pilota automatico viene spento; quest'ultimo resta acceso nché non viene
spento dal dispositivo GHC 20 principale.

Istruzioni di installazione di GHP 10V 9
AvvertenzA
Se l'imbarcazione dispone di una rete NMEA 2000 esistente, questa dovrebbe
essere già collegata all'alimentazione. Non collegare il cavo di alimentazione
NMEA 2000 alla rete NMEA 2000 esistente, poiché è possibile collegare solo una
fonte di alimentazione alla rete NMEA 2000.
Collegare il dispositivo GHC 20 all'unità CCU tramite la rete NMEA 2000
esistente. Se non si dispone di una rete NMEA 2000 sull'imbarcazione, tutti i
componenti necessari per la congurazione di una rete sono forniti in dotazione
nella confezione del sistema GHP 10V (pagina 10).
Per utilizzare le funzioni avanzate del sistema GHP 10V, è possibile collegare
dispositivi opzionali compatibili con NMEA 2000, quali un dispositivo GPS alla
rete NMEA 2000.
Per ulteriori informazioni su NMEA 2000, consultare il sito Web
www.garmin.com.
1. Stabilire il punto in cui collegare il dispositivo GHC 20
➊
al backbone
NMEA 2000 esistente
➋
(pagina 5).
➊
➋
➌
➍
2. Scollegare un'estremità del connettore a T NMEA 2000 dalla rete.
3. Se necessario, per estendere il backbone NMEA 2000, collegare una prolunga
del backbone NMEA 2000 (non in dotazione) all'estremità del connettore a T
scollegato.
4. Aggiungere il connettore a T-in dotazione
➌
per il dispositivo GHC 20 al
backbone NMEA 2000 collegandolo all'estremità del connettore a T- o al
cavo prolunga del backbone.
5. Instradare il cavo di derivazione in dotazione
➍
verso la parte inferiore del
connettore a T aggiunto al passaggio 4, quindi collegarlo al connettore a T.
Se il cavo di derivazione in dotazione non è abbastanza lungo, è possibile
aggiungere una prolunga di massimo 6 m (20 piedi) (non in dotazione).
6. Collegare il cavo di derivazione al dispositivo GHC 20.
7. Collegare il cavo di derivazione al connettore a T aggiunto al passaggio 4 e al
dispositivo GHC 20.
NOTA: per l'accensione del pilota automatico, è necessario collegare il
lo giallo del cavo dati del dispositivo GHC 20 al lo giallo del cavo di
interconnessione dell'unità CCU e il lo nero del cavo dati del dispositivo
GHC 20 alla stessa massa dell'unità CCU (pagina 8).
1. Stabilire il punto in cui collegare l'unità CCU
➊
al backbone NMEA 2000
esistente
➋
(pagina 5).
➊
➋
➌
➍
2. Scollegare un'estremità del connettore a T NMEA 2000 dalla rete.
3. Se necessario, per estendere il backbone NMEA 2000, collegare una prolunga
del backbone NMEA 2000 (non in dotazione) all'estremità del connettore a T
scollegato.
4. Aggiungere il connettore a T-in dotazione
➌
per l'unità CCU al backbone
NMEA 2000 collegandolo all'estremità del connettore a T- o al cavo prolunga
del backbone.
5. Instradare il cavo di derivazione in dotazione
➍
verso la parte inferiore del
connettore a T aggiunto al passaggio 4, quindi collegarlo al connettore a T.
Se il cavo di derivazione in dotazione non è abbastanza lungo, è possibile
aggiungere una prolunga di massimo 6 m (20 piedi) (non in dotazione).
6. Collegare il cavo di derivazione all'unità CCU.

10 Istruzioni di installazione di GHP 10V
AvvertenzA
È necessario collegare il cavo di alimentazione NMEA 2000 in dotazione
all'interruttore di accensione dell'imbarcazione o a un altro interruttore in linea. Se
il cavo di alimentazione NMEA 2000 viene collegato direttamente, il dispositivo
GHC 20 potrebbe scaricare le batterie.
1. Unire i tre connettori a T
➊
, posizionandoli uno di anco all'altro.
+
-
➊
➋
➎
➏
➐
➑
➑
➍
➌
2. Collegare il cavo di alimentazione NMEA 2000 in dotazione
➋
a una fonte di
alimentazione a 12 V cc
➌
tramite un interruttore.
È possibile utilizzare l'interruttore di accensione
➍
dell'imbarcazione o un
interruttore in linea (non in dotazione).
3. Collegare il cavo di alimentazione NMEA 2000 a un connettore a T.
4. Collegare un cavo di derivazione NMEA 2000 incluso
➎
ad un connettore a
T e al dispositivo GHC 20
➏
.
5. Collegare l'altro cavo di derivazione NMEA 2000 incluso all'altro connettore
a T e all'unità CCU
➐
.
6. Collegare i terminatori maschio e femmina
➑
a ciascuna estremità dei
connettori a T combinati.
NOTA: il dispositivo GHC 20 deve essere collegato all'unità CCU con il cavo
di segnalazione giallo dell'unità CCU nel cavo dati del dispositivo GHC 20. Il
lo nero deve essere collegato alla massa dell'unità CCU (pagina 8).
Per utilizzare le funzioni avanzate del sistema GHP 10V, collegare dispositivi
opzionali compatibili con NMEA 2000 o NMEA 0183, ad esempio un dispositivo
GPS alla rete NMEA 2000 o al dispositivo GHC 20 tramite la rete NMEA 0183.
• Per identicare i cavi di trasferimento (Tx) A(+) e B(-) del dispositivo
compatibile con NMEA 0183, consultare le istruzioni di installazione del
dispositivo.
• Quando i dispositivi NMEA 0183 vengono collegati con due linee di
trasmissione e due di ricezione, non è necessario collegare il bus NMEA 2000
e il dispositivo NMEA 0183 a terra.
• Quando un dispositivo NMEA 0183 è collegato a un solo cavo di
trasmissione (Tx) o a un solo cavo di ricezione (Rx), è necessario collegare il
bus NMEA 2000 e il dispositivo NMEA 0183 a terra.
1. Stabilire il collegamento di NMEA 0183 del dispositivo compatibile con
NMEA 0183.
2. Collegare il dispositivo compatibile con NMEA 0183 al dispositivo GHC 20,
in base alla tabella riportata di seguito.
Nero Massa del segnale CCU
Giallo Segnale CCU
Blu Tx/A(+)
Bianco Tx/B(-)
Marrone Rx/A(+)
Verde Rx/B(-)
Nell'appendice, vengono forniti tre esempi dei vari collegamenti (pagina 13).
3. Se necessario, utilizzare un cavo a doppino 22 AWG (,33 mm
2
) come
prolunga.
4. Saldare e isolare tutti i cavi non rivestiti.

Istruzioni di installazione di GHP 10V 11
Il sistema GHP 10V deve essere congurato e ottimizzato in base alla dinamica
dell'imbarcazione e alla congurazione del motore. Usare la procedura Sea Trial
Wizard sul dispositivo GHC 20 per congurare il sistema GHP 10V. Queste
procedure guidano l'utente attraverso le fasi di congurazione richieste.
La procedura Sea Trial Wizard congura i sensori fondamentali del pilota
automatico, quindi è estremamente importante eseguire la procedura in condizioni
appropriate per l'imbarcazione.
Completare la procedura Sea Trial Wizard quando il mare è calmo. La natura del
mare calmo dipende dalle dimensioni e dalla forma dell'imbarcazione.
• Assicurarsi che l'imbarcazione non oscilli durante la sosta o il movimento
molto lento.
• Assicurarsi che l'imbarcazione non sia inuenzata in modo considerevole dal
vento.
• Bilanciare il peso dell'imbarcazione. NON spostarsi all'interno
dell'imbarcazione durante l'esecuzione di una fase qualsiasi della
procedura Sea Trial Wizard.
Prima di avviare la procedura Sea Trial Wizard, è necessario reacarsi in un'area
aperta con mare calmo.
1. Accendere il sistema GHP 10V.
2. Selezionare un'opzione:
• Se la procedura Sea Trial Wizard si avvia automaticamente, procedere al
passaggio 3.
• Se la procedura Sea Trial Wizard non si avvia automaticamente,
selezionare Menu > Impostazione > Congurazione predenita pilota
automatico > Procedure guidate > Sea Trial Wizard.
3. Selezionare Inizio.
1. Portare l'imbarcazione in un'area di mare aperto e calmo.
2. Avviare la procedura Sea Trial Wizard (pagina 11).
3. Congurare i giri di planata (pagina 11).
4. Calibrare la bussola (pagina 11).
5. Eseguire la procedura di messa a punto automatica (pagina 11).
6. Impostare il nord (pagina 11).
7. Se necessario, impostare la regolazione precisa della direzione (pagina 11).
1. Annotare il valore RPM (giri) dal tachimetro sul cruscotto dell'imbarcazione
nel momento in cui l'imbarcazione passa dal dislocamento alla velocità di
planata.
2. Se il valore del tachimetro non corrisponde a quello dell'unità GHC 20,
regolarlo utilizzando le frecce.
3. Selezionare Fatto.
1. Condurre l'imbarcazione a bassa velocità/al minimo in linea retta.
2. Selezionare Inizio, quindi proseguire in linea retta.
3. Quando viene indicato, iniziare una lenta rotazione in senso orario, facendo
attenzione a virare nel modo più regolare ed uniforme possibile.
Virare lentamente in modo che l'imbarcazione NON si inclini.
Nel dispositivo GHC 20 viene visualizzato un messaggio che indica il termine
della calibrazione.
4. Selezionare un'opzione:
• Se la calibrazione viene eseguita correttamente, selezionare Fatto.
• In caso contrario, selezionare Riprova quindi ripetere i passaggi 1–3.
Per poter eseguire la procedura di messa a punto automatica, è necessario
assicurarsi di disporre di un lungo tratto di mare aperto.
1. Rallentare in modo che l'imbarcazione proceda al di sotto della velocità di
planata.
2. Selezionare Inizio.
L'imbarcazione esegue un certo numero di movimenti a zig-zag mentre la
procedura di messa a punto automatica è in funzione.
Nel dispositivo GHC 20 viene visualizzato un messaggio che indica il termine
dell'operazione.
3. Selezionare un'opzione:
• Se la procedura di messa a punto automatica viene completata
correttamente, selezionare Fatto e riprendere il controllo manuale
dell'imbarcazione.
• In caso contrario, modicare l'andatura e selezionare Riprova messa a
punto automatica.
4. Se il problema persiste, ripetere i passaggi 1–3 nché la procedura di messa a
punto automatica non viene completata correttamente.
5. Se il problema persiste dopo aver raggiunto la velocità massima di crociera,
tornare alla velocità di messa a punto iniziale e selezionare Messa a punto
automatica alternativa per avviare una procedura di messa a punto
automatica alternativa.
Per poter impostare il nord, è necessario disporre almeno di 45 secondi di
preavviso per un eventuale pericolo e di un ampio tratto di mare aperto.
Questa procedura viene visualizzata solo se si collega un dispositivo GPS
opzionale al sistema GHP 10V (pagina 10) e il dispositivo ha acquisito la
posizione GPS. Se non è collegato alcun dispositivo GPS, viene richiesto di
impostare la regolazione precisa della direzione (pagina 11).
1. Guidare l'imbarcazione in linea retta, alla velocità di crociera, e selezionare
Inizio.
Nel dispositivo GHC 20 viene visualizzato un messaggio che indica il termine
della calibrazione.
2. Selezionare un'opzione:
• Se la calibrazione è stata eseguita correttamente, selezionare Fatto.
• In caso contrario, ripetere i passaggi 1–2.
Questa procedura viene visualizzata solo se al sistema GHP 10V non sono
collegati dispositivi GPS opzionali (pagina 10). In alternativa, se non è installato
alcun dispositivo GPS sull'imbarcazione che ha acquisito la posizione GPS, viene
richiesto di impostare il nord (pagina 11).
1. Tramite la bussola palmare, individuare il nord.
2. Regolare l'impostazione precisa della direzione nché non corrisponde al
nord sulla bussola magnetica.
3. Selezionare Fatto.
1. Guidare il pilota automatico a bassa velocità.
2. Se necessario, regolare l'impostazione del guadagno (pagina 12).
3. Vericare il pilota automatico a una velocità più sostenuta (in condizioni
d'uso normali).
4. Se necessario, regolare le impostazioni del guadagno e del limitatore
dell'accelerazione.
12 Istruzioni di installazione di GHP 10V
1. Condurre l'imbarcazione verso una direzione con il pilota automatico attivato
(mantenimento direzione).
L'imbarcazione non dovrebbe oscillare; tuttavia, è normale che si verichino
lievi oscillazioni.
2. Effettuare una virata mediante il pilota automatico e osservarne il
comportamento.
L'imbarcazione dovrebbe virare moderatamente, non troppo velocemente, né
troppo lentamente.
Quando si vira tramite il pilota automatico, l'imbarcazione dovrebbe
approcciare e stabilirsi sulla direzione desiderata con la minima quantità di
oscillazioni e correzioni.
3. Selezionare un'opzione:
• Se l'imbarcazione vira troppo velocemente o troppo lentamente, regolare
il limitatore dell'accelerazione del pilota automatico (pagina 12).
• Se il mantenimento direzione fa oscillare in modo considerevole
l'imbarcazione non si corregge durante la virata, regolare il guadagno del
pilota automatico (pagina 12).
• Se l'imbarcazione vira dolcemente, il mantenimento direzione oscilla solo
lievemente o non oscilla affatto e l'imbarcazione regola correttamente la
direzione, procedere al passaggio 5.
4. Ripetere i passaggi 2 e 3 nché l'imbarcazione non sterza lentamente, il
mantenimento direzione non oscilla a malapena o affatto e l'imbarcazione non
regola correttamente la direzione.
5. Per le imbarcazioni plananti, ripetere i passaggi 1–4 a velocità più sostenute
(pagina 12).
NOTA: quando si regola manualmente il limitatore dell'accelerazione, effettuare
regolazioni relativamente piccole. Vericare i cambiamenti prima di eseguire
ulteriori regolazioni.
1. Accendere il sistema GHP 10V tramite la procedura di attivazione della
congurazione avanzata (pagina 12).
2. Sul dispositivo GHC 20V, selezionare Menu > Impostazione >
Congurazione predenita pilota automatico > Messa a punto pilota
automatico > Limitatore accelerazione.
3. Selezionare un'opzione:
• Aumentare il valore dell'impostazione se il pilota automatico vira troppo
velocemente.
• Ridurre il valore dell'impostazione se il pilota automatico vira troppo
lentamente.
4. Eseguire il test della congurazione del pilota automatico.
5. Ripetere le fasi 2 e 3 nché le prestazioni dell'unità GHP 10V non sono
soddisfacenti.
NOTA: quando si regola manualmente il guadagno del timone (o quello della
controvirata), effettuare regolazioni relativamente piccole e regolare un solo
valore alla volta. Vericare i cambiamenti prima di eseguire ulteriori regolazioni.
1. Attivare la procedura di congurazione avanzata (pagina 12).
2. Sul dispositivo GHC 20, selezionare Menu > Impostazione >
Congurazione predenita pilota automatico > Messa a punto pilota
automatico > Guadagni del timone.
3. Selezionare un'opzione:
• Selezionare Bassa velocità o Alta velocità e utilizzare le frecce sul
dispositivo GHC 20 per regolare quanto velocemente il timone debba
reagire per il mantenimento della direzione e per effettuare virate ad alta
o bassa velocità.
Se questo valore viene impostato su un livello troppo elevato, il pilota
automatico potrebbe risultare iperattivo e tentare regolazioni costanti
della direzione alla benché minima deviazione. Un pilota automatico
iperattivo potrebbe provocare un'eccessiva usura dell'unità di comando,
quindi il consumo della batteria in tempi più rapidi.
• Selezionare Contatore per bassa velocità o Contatore per alta velocità
per regolare la reattività del timone nella correzione delle controvirate.
Se questo valore viene impostato su un livello troppo elevato, il pilota
automatico potrebbe di nuovo mancare la sterzata durante il tentativo di
controcorrezione della sterzata originale.
4. Eseguire il test della congurazione del pilota automatico.
5. Ripetere le fasi 2 e 3 nché le prestazioni dell'unità GHP 10V non sono
soddisfacenti.
Le opzioni di congurazione avanzata non sono disponibili sul dispositivo
GHC 20 in condizioni normali. Per accedere alle impostazioni di congurazione
avanzata del sistema GHP 10V, attivare la procedura di congurazione avanzata.
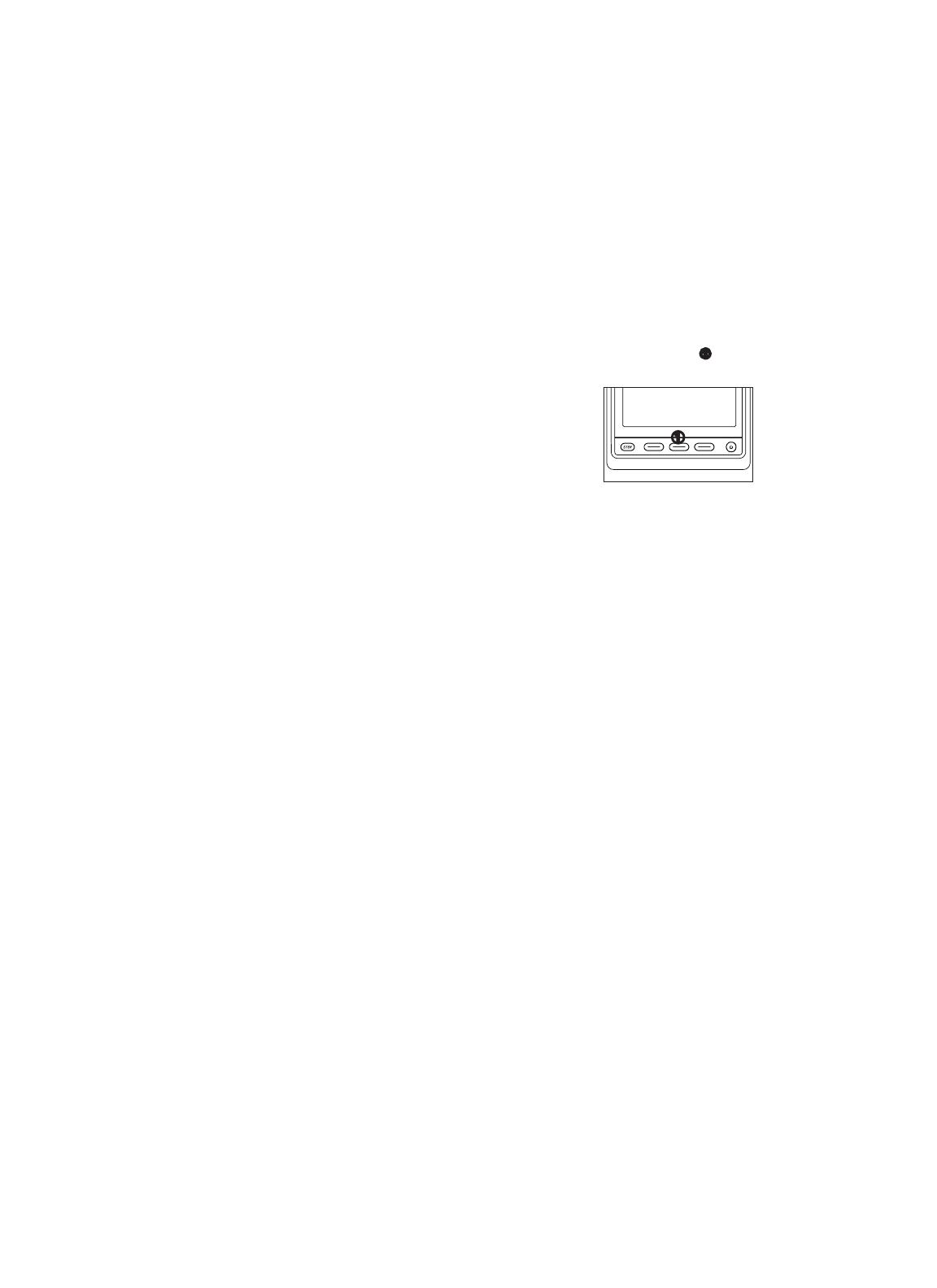
1. Nella schermata della direzione, selezionare Menu > Impostazione >
Sistema > Informazioni sul sistema.
2. Tenere premuto il tasto funzione centrale
➊
per 5 secondi.
Viene visualizzata la modalità Dealer.
➊
3. Premere Indietro > Indietro.
Se l'opzione per la congurazione predenita del pilota automatico è
disponibile nella schermata Impostazione, signica che la procedura di
congurazione avanzata è attiva.
È possibile eseguire il processo di congurazione della messa a punto automatica,
calibrare la bussola e stabilire il nord sul sistema GHP 10V tramite il dispositivo
GHC 20 senza eseguire le procedure guidate. È inoltre possibile denire la
maggior parte delle impostazioni singolarmente, senza eseguire i processi di
congurazione.
1. Attivare la procedura di congurazione avanzata (pagina 12).
2. Nella schermata Direzione, selezionare Menu > Impostazione >
Congurazione predenita pilota automatico > Impostazioni
automatiche.
3. Selezionare Messa a punto automatica, Calibrazione bussola o Imposta
nord.
4. Seguire le istruzioni visualizzate sullo schermo.
La procedura Sea Trial Wizard consente di denire rapidamente tutte le
impostazioni di congurazione importanti sul sistema GHP 10V. Dopo
l'esecuzione della procedura guidata, se il sistema GHP 10V non sembra
funzionare correttamente, è possibile riavviare la procedura guidata in qualsiasi
momento. Per accedere alla procedura guidata, attivare la procedura di
congurazione avanzata (pagina 12).
1. Attivare la procedura di congurazione avanzata (pagina 12).
2. Nella schermata Direzione, selezionare Menu > Impostazione >
Congurazione predenita pilota automatico.
3. Selezionare una categoria di impostazioni.
4. Selezionare un'impostazione da congurare.
Le descrizioni di ciascuna impostazione sono disponibili nell'appendice
(pagina 15).
5. Congurare il valore dell'impostazione.
NOTA: la congurazione di determinate impostazioni nella procedura di congu-
razione predenita del pilota automatico potrebbe richiedere di modicare altre
impostazioni. Rivedere la sezione relativa alle impostazioni di congurazione del
sistema GHP 10V (pagina 15) prima di modicare qualsiasi impostazione.

Istruzioni di installazione di GHP 10V 13
I tre schemi dei collegamenti riportati di seguito sono esempi di varie situazioni
che possono vericarsi durante il collegamento del dispositivo NMEA 0183 a
GHC 20.
>
>
>
>
>
>
>
>
+
-
➊
➌
➋
➊
➍
➎
➏
➋
➍
➌
➊
GHC 20
➋
Rete NMEA 2000 (fornisce alimentazione al dispositivo GHC 20)
➌
Fonte di alimentazione da 12 V CC
➍
Dispositivo NMEA 0183 compatibile
➊
N/D Alimentazione
➋
N/D Massa NMEA 0183
➌
Blu – Tx/A (+) Rx/A(+)
➍
Bianco – Tx/B (-) Rx/B(-)
➎
Marrone – Rx/A (+) Tx/A(+)
➏
Verde – Rx/B (-) Tx/B(-)
NOTA: quando i dispositivi NMEA 0183 vengono collegati con due linee di
trasmissione e due di ricezione, non è necessario collegare il bus NMEA 2000 e il
dispositivo NMEA 0183 a terra.
Se il dispositivo compatibile con NMEA 0183 dispone solo di un cavo di
ricezione (Rx), collegarlo al lo blu (Tx/A) del dispositivo GHC 20, lasciando il
lo bianco proveniente dal dispositivo GHC 20 (Tx/B) scollegato.
>
>
>
>
>
>
+
-
➊
➌
➋
➊
➍
➎
➏
➋
➍
➌
➊
GHC 20
➋
Rete NMEA 2000 (fornisce alimentazione al dispositivo GHC 20)
➌
Fonte di alimentazione da 12 V CC
➍
Dispositivo NMEA 0183 compatibile
➊
N/D Alimentazione
➋
N/D Massa NMEA 0183
➌
Blu – Tx/A (+) Rx
➍
Bianco – non collegato N/D
➎
Marrone – Rx/A (+) Tx/A(+)
➏
Verde – Rx/B (-) Tx/B(-)
NOTA: quando un dispositivo NMEA 0183 è collegato a un solo cavo di
ricezione (Rx), è necessario collegare il bus NMEA 2000 e il dispositivo
NMEA 0183 a terra.
Se il dispositivo compatibile con NMEA 0183 in uso dispone solo di un cavo di
trasmissione (Tx), collegarlo al lo marrone (Rx/A) del dispositivo GHC 20 e
collegare il lo verde (Rx/B) del dispositivo GHC 20 alla massa NMEA.
>
>
>
>
>
>
+
-
➊
➌
➋
➊
➍
➎
➋
➍
➌
➊
GHC 20
➋
Rete NMEA 2000 (fornisce alimentazione al dispositivo GHC 20)
➌
Fonte di alimentazione da 12 V CC
➍
Dispositivo NMEA 0183 compatibile
➊
N/D Alimentazione
➋
Verde – Rx/B – collegare
alla massa NMEA 0183
Massa NMEA 0183
➌
Blu – Tx/A (+) Rx/A(+)
➍
Bianco – Tx/B (-) Rx/B(-)
➎
Marrone – Rx/A (+) Tx/A(+)
NOTA: quando un dispositivo NMEA 0183 è collegato a un solo cavo di
trasmissione (Tx), è necessario collegare il bus NMEA 2000 e il dispositivo
NMEA 0183 a terra.

14 Istruzioni di installazione di GHP 10V
CCU Dimensioni 91,4 mm (3
19
/
32
poll.) di diametro
Peso 159 g (5,6 once)
Intervallo di
temperatura
Da -15 °C a 55 °C (da 5 °F a 131 °F)
Materiale del
rivestimento
Completamente stagna, in plastica a elevata
resistenza, impermeabile in conformità agli
standard IEC 529 IPX7
Lunghezza
del cavo di
interconnessione
dell'unità CCU
5 m (16 piedi)
Numero LEN
NMEA 2000
2 (100 mA)
Allarme Dimensioni (L × diametro): 23 × 25 mm (
29
/
32
× 1 poll.)
Peso 68 g (2,4 once)
Intervallo di
temperatura
Da -15 °C a 55 °C (da 5 °F a 131 °F)
Lunghezza del
cavo
3 m (10 piedi)
Gateway
del pilota
automatico
Dimensioni 130 × 60 × 25 mm (5
1
/
8
× 2
3
/
8
× 1 poll.)
Peso Meno di 28 g (circa 1 oncia)
GHC 20 Dimensioni 110 × 115 × 30 mm (4
21
/
64
× 4
17
/
32
× 1
3
/
16
poll.)
Peso 247 g (8,71 once)
Cavi Cavo dati NMEA 0183: 1,8 m (6 piedi)
Cavo di derivazione e cavo di alimentazione
NMEA 2000 – 2 m (6
1
/
2
piedi)
Intervallo di
temperatura
Da -15 °C a 70 °C (da 5 °F a 158 °F)
Distanza di
sicurezza dalla
bussola
209 mm (8
1
/
4
poll. )
Materiale Custodia: completamente stagna in
policarbonato, impermeabile no agli
standard IEC 60529 IPX7
Ottica: vetro con trattamento anti-riesso
Consumo
energetico
dispositivo
GHC 20
2,5 W max.
Voltaggio
in entrata
NMEA 2000
9–16 V cc
Numero LEN
NMEA 2000
6 (300 mA)
Ricezione
059392 Riconoscimento ISO
059904 Richiesta ISO
060928 Richiesta indirizzo ISO
126208 NMEA – Funzione di gruppo comando/richiesta/
riconoscimento
126464 Funzione di gruppo elenco PGN in trasmissione/
ricezione
126996 Informazioni sul prodotto
127258 Variazione magnetica
127488 Parametri motore – Aggiornamento rapido
129025 Posizione – Aggiornamento rapido
129026 COG & SOG – Aggiornamento rapido
129283 Errore di traversata (Cross Track Error)
129284 Dati navigazione
Trasmissione
059392 Riconoscimento ISO
059904 Richiesta ISO
060928 Richiesta indirizzo ISO
126208 NMEA – Funzione di gruppo comando/richiesta/
riconoscimento
126464 Funzione di gruppo elenco PGN in trasmissione/
ricezione
126996 Informazioni sul prodotto
127245 Dati del timone
127250 Direzione imbarcazione
Ricezione
059392 Riconoscimento ISO
059904 Richiesta ISO
060928 Richiesta indirizzo ISO
126208 NMEA – Funzione di gruppo comando/richiesta/
riconoscimento
126464 Funzione di gruppo elenco PGN in trasmissione/
ricezione
126996 Informazioni sul prodotto
127245 Dati del timone
127250 Direzione imbarcazione
127488 Parametri motore – Aggiornamento rapido
128259 Velocità sull'acqua
129025 Posizione – Aggiornamento rapido
129029 Dati posizione GNSS
129283 Errore di traversata (Cross Track Error)
129284 Dati navigazione
129285 Navigazione – Informazioni waypoint/percorso
130306 Dati vento
130576 Stato piccola imbarcazione
Trasmissione
059392 Riconoscimento ISO
059904 Richiesta ISO
060928 Richiesta indirizzo ISO
126208 NMEA – Funzione di gruppo comando/richiesta/
riconoscimento
126464 Funzione di gruppo elenco PGN in trasmissione/
ricezione
126996 Informazioni sul prodotto
128259 Velocità sull'acqua
129025 Posizione – Aggiornamento rapido
129026 COG & SOG – Aggiornamento rapido
129283 Errore di traversata (Cross Track Error)
129284 Dati navigazione
129540 Satelliti GNSS in vista
130306 Dati vento
Il sistema GHP 10V e il dispositivo GHC 20 sono certicati NMEA 2000.

Istruzioni di installazione di GHP 10V 15
Quando è collegato a dispositivi opzionali compatibili con NMEA 0183, il
dispositivo GHC 20 utilizza le seguenti frasi NMEA 0183.
Ricezione wpl
gga
grme
gsa
gsv
rmc
bod
bwc
dtm
gll
rmb
vhw
mwv
xte
Trasmissione hdg
Benché tutte le congurazione vengano in genere completate automaticamente
tramite la procedura guidata, è possibile regolare manualmente qualsiasi
impostazione (pagina 12).
NOTA: a seconda della congurazione del pilota automatico, è possibile che
determinate impostazioni non vengano visualizzate.
Impostazione sorgente
di velocità
Verica
tachimetro
Consente di confrontare i valori
RPM del dispositivo GHC 20 con
quelli visualizzati sui tachimetri
sul cruscotto dell'imbarcazione.
Impostazione sorgente
di velocità
RPM di planata Consente di regolare il valore
RPM del dispositivo GHC 20 nel
momento in cui l'imbarcazione
passa dallo spostamento alla
velocità di planata. Se il valore
non corrisponde a quello
dell'unità GHC 20, regolarlo
utilizzando le frecce.
Impostazione sorgente
di velocità
Limite RPM
basso
Consente di regolare il
punto RPM più basso
dell'imbarcazione. Se il valore
non corrisponde a quello
dell'unità GHC 20, regolarlo
utilizzando le frecce.
Impostazione sorgente
di velocità
Limite RPM alto Consente di regolare il punto
RPM più alto dell'imbarcazione.
Se il valore non corrisponde
a quello dell'unità GHC 20,
regolarlo utilizzando le frecce.
Guadagni del timone Bassa velocità Consente di impostare il
guadagno del timone per le
basse velocità.
Questa impostazione si applica
all'imbarcazione che viaggia al di
sotto della velocità di planata.
Se questo valore viene impostato
su un livello troppo elevato,
il pilota automatico potrebbe
risultare iperattivo e tentare
regolazioni costanti della
direzione alla benché minima
deviazione. Un pilota automatico
iperattivo potrebbe provocare
un'eccessiva usura dell'unità di
comando (pagina 12).
Guadagni del timone Contatore per
bassa velocità
Consente di impostare la
controcorrezione del guadagno
del timone per le basse velocità.
Questa impostazione si applica
all'imbarcazione che viaggia al di
sotto della velocità di planata.
Se questo valore viene impostato
su un livello troppo elevato,
il pilota automatico potrebbe
risultare iperattivo e tentare
regolazioni costanti della
direzione alla benché minima
deviazione. Un pilota automatico
iperattivo potrebbe provocare
un'eccessiva usura dell'unità di
comando (pagina 12).
Guadagni del timone Alta velocità Consente di impostare il
guadagno del timone per le alte
velocità.
Questa impostazione si applica
all'imbarcazione che viaggia al di
sopra della velocità di planata.
Se questo valore viene impostato
su un livello troppo elevato,
il pilota automatico potrebbe
risultare iperattivo e tentare
regolazioni costanti della
direzione alla benché minima
deviazione. Un pilota automatico
iperattivo potrebbe provocare
un'eccessiva usura dell'unità di
comando (pagina 12).
Guadagni del timone Contatore per
alta velocità
Consente di impostare la
controcorrezione del guadagno
del timone per le alte velocità.
Questa impostazione si applica
all'imbarcazione che viaggia al di
sopra della velocità di planata.
Se questo valore viene impostato
su un livello troppo elevato,
il pilota automatico potrebbe
risultare iperattivo e tentare
regolazioni costanti della
direzione alla benché minima
deviazione. Un pilota automatico
iperattivo potrebbe provocare
un'eccessiva usura dell'unità di
comando (pagina 12).
Impostaz. NMEA Checksum
NMEA
Se l'unità GPS NMEA 0183
collegata non calcola i checksum
in modo corretto, è possibile
utilizzarla comunque se si
disattiva questa impostazione.
Una volta spenta, l'integrità dei
dati viene compromessa.

16 Istruzioni di installazione di GHP 10V
Impostaz. NMEA XTE invertito Se l'unità GPS NMEA 0183
collegata invia la direzione di
sterzata errata con il segnale
di errore di traversata (Cross
Track Error). È possibile
utilizzare questa impostazione
per correggere la direzione della
sterzata.
Impostazioni di
navigazione
Guadagno di
navigazione
Consente di regolare
l'aggressività con cui il pilota
automatico elimina l'errore di
traversata durante la navigazione
di un percorso Rotta verso.
Se il valore è troppo alto, il pilota
automatico può oscillare avanti e
indietro lungo la linea della rotta
su grandi distanze.
Se il valore è troppo basso, il
pilota automatico può rispondere
lentamente al comando di
eliminazione dell'errore di
traversata.
Impostazioni di
navigazione
Guadagno
assetto
navigazione
Consente di regolare la
percentuale accettabile di un
errore di traversata a lungo
termine durante la navigazione
di un percorso Rotta verso.
Regolare questa impostazione
solo dopo aver impostato il
guadagno di navigazione.
Se il valore è troppo alto,
eseguirà una compensazione
eccessiva per l'errore di
traversata.
Se il valore è troppo basso, il
pilota automatico consentirà
un'ampia percentuale di errore di
traversata a lungo termine.
NOTA: le impostazioni di congurazione avanzate sono disponibili quando si
utilizza la procedura di congurazione avanzata (pagina 12). Altre impostazioni
sono disponibili durante il normale utilizzo del sistema GHP 10V. Per ulteriori
informazioni, consultare la sezione sulla congurazione del Manuale Utente del
dispositivo GHC 20.
Il pilota automatico
non riceve i dati di
navigazione. Il pilota
automatico impostato su
Mantenimento direzione.
Il pilota automatico
non riceve più dati
di navigazione validi
durante l'esecuzione di
una Rotta verso.
Questo messaggio
viene inoltre visualizzato
se la navigazione
viene interrotta su
un chartplotter prima
di disattivare il pilota
automatico.
• Viene attivato l'allarme
• Transizioni del
pilota automatico su
mantenimento direzione
Connessione con pilota
automatico persa
Il dispositivo GHC ha
perso la connessione
con l'unità CCU.
N/D
Tensione di
alimentazione di GHC
bassa
Il livello della tensione di
alimentazione è inferiore
al valore specicato nel
menu allarme bassa
tensione.
N/D

Istruzioni di installazione di GHP 10V 17
➊
➊
Su, nell'installazione su una
supercie verticale


Istruzioni di installazione di GHP 10V 19
Staccare questo elenco di controllo dalle istruzioni di installazione e usarlo come ausilio durante la procedura di installazione del sistema GHP 10V.
Leggere tutte le istruzioni prima di installare il sistema 10V. In caso di dubbi durante il processo di installazione, contattare il servizio di assistenza Garmin.
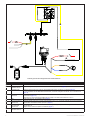
1.Consultare lo schema e le note riportate a partire da pagina 6 per una descrizione delle connessioni elettriche/dati necessarie.
2. Preparare prima tutti i componenti. Controllare la lunghezza dei cavi. Se necessario, procurarsi delle prolunghe.
3. Montare l'unità CCU seguendo le istruzioni riportate a partire da pagina 5. Montare l'unità CCU in un luogo lontano da interferenze magnetiche.
Utilizzare una bussola palmare per vericare l'assenza di interferenze magnetiche nell'area. Montare l'unità CCU sulla staffa in modo che i cavi
elettrici pendano verso il basso.
4. Montare il dispositivo GHC 20 seguendo le istruzioni riportate a partire da pagina 5.
5.Montare il gateway del pilota automatico seguendo le istruzioni a pagina 7.
6.Collegare il gateway del pilota automatico al bus multilink Volvo (pagina 8).
7.Collegare il gateway del pilota automatico all'unità CCU mediante il cavo di interconnessione CCU (pagina 8).
8. Collegare il dispositivo GHC 20 e l'unità CCU a una rete NMEA 2000. Collegare un dispositivo GPS opzionale, compatibile con NMEA 2000- alla rete
NMEA 2000 (pagina 9).
9. Collegare il lo giallo del cavo dati del dispositivo GHC 20 al cavo di segnalazione giallo dell'unità CCU sul cavo di interconnessione dell'unità CCU
e il lo nero sul cavo dati del dispositivo GHC 20 alla massa dell'unità CCU. Collegare un dispositivo GPS opzionale, compatibile con NMEA 0183 al
dispositivo GHC 20 se non è disponibile un dispositivo GPS compatibile con NMEA 2000- (pagina 10).
10. Per congurare il sistema GHP 10V, eseguire la procedura Sea Trial Wizard (pagina 11).

© 2013 Garmin Ltd. o società afliate
Tutti i diritti riservati. Nessuna sezione del presente manuale può essere riprodotta, copiata, trasmessa, distribuita, scaricata o archiviata su un supporto di memorizzazione per qualsiasi scopo senza
previa autorizzazione scritta di Garmin, salvo ove espressamente indicato. Garmin autorizza l'utente a scaricare una singola copia del presente manuale su un disco rigido o su un altro supporto di
memorizzazione elettronica per la visualizzazione, nonché a stampare una copia del suddetto documento o di eventuali versioni successive, a condizione che tale copia elettronica o cartacea riporti
il testo completo di questa nota sul copyright. È inoltre severamente proibita la distribuzione commerciale non autorizzata del presente manuale o di eventuali versioni successive.
Le informazioni contenute nel presente documento sono soggette a modica senza preavviso. Garmin si riserva il diritto di modicare o migliorare i prodotti e di apportare modiche al contenuto
senza obbligo di preavviso nei confronti di persone o organizzazioni. Per eventuali aggiornamenti e informazioni aggiuntive sull'utilizzo e il funzionamento di questo e altri prodotti Garmin, visitare
il sito Web Garmin (www.garmin.com).
Garmin
®
, il logo Garmin e GPSMAP
®
sono marchi registrati di Garmin Ltd. o delle relative società afliate, registrati negli Stati Uniti e in altri paesi. GHP
™
, GHC
™
e myGarmin
™
sono marchi di
Garmin Ltd. o delle società afliate. L'uso di tali marchi non è consentito senza il consenso esplicito di Garmin. Volvo
®
è un marchio registrato di Volvo Trademark Holding AB. NMEA 2000
®
è un
marchio registrato della National Marine Electronics Association. Loctite
®
e Pro Lock Tight
®
sono marchi registrati di Henkel Corporation.
© 2013 Garmin Ltd. o società afliate
Garmin International, Inc.
1200 East 151st Street Olathe, Kansas 66062, Stati Uniti
Garmin (Europe) Ltd.
Liberty House, Hounsdown Business Park, Southampton, Hampshire, SO40 9LR Regno Unito
Garmin Corporation
No. 68, Zhangshu 2nd Road, Xizhi Dist. New Taipei City, 221, Taiwan (RDC)
www.garmin.com
Maggio 2013 190-01334-51 Rev. A Stampato a Taiwan
-
 1
1
-
 2
2
-
 3
3
-
 4
4
-
 5
5
-
 6
6
-
 7
7
-
 8
8
-
 9
9
-
 10
10
-
 11
11
-
 12
12
-
 13
13
-
 14
14
-
 15
15
-
 16
16
-
 17
17
-
 18
18
-
 19
19
-
 20
20




















Garmin Sistema de piloto automatico nautico GHP 10V Guida d'installazione
- Categoria
- Dock station per dispositivi mobili
- Tipo
- Guida d'installazione
Documenti correlati
-
Garmin GHP™ 20 Marine Autopilot System for Viking® Guida d'installazione
-
Garmin GHP 10, Marine Autopilot System Guida d'installazione
-
Garmin GHP Reactor per timonerie meccaniche / idrauliche / solenoidi Guida d'installazione
-
Garmin GHP Reactor™ Hydraulic Autopilot Guida d'installazione
-
Garmin Serie de piloto automatico GHP Reactor com SmartPump Guida d'installazione
-
Garmin GHP™ 12 Autopilot System Guida d'installazione
-
Garmin GHP Compact Reactor-Hydraulikautopilot (Starterpaket) Guida d'installazione
-
Garmin GHP Reactor™ Steer-by-wire Corepack for Yamaha® Helm Master™ Guida d'installazione
-
Garmin Sistema de piloto automatico maritimo GHP 10V Manuale utente
-
Garmin Mehanski/nadgraditveni/elektromagnetni osnovni paket Reactor 40 Guida d'installazione