SICK Safe AGV Easy – Variant 4-6 Istruzioni per l'uso
- Tipo
- Istruzioni per l'uso

O P E R A T I N G I N S T R U C T I O N S
Safe AGV Easy
Safety System

Described product
S
afe AGV Easy
Manufacturer
SIC
K AG
Erwin-Sick-Str. 1
79183 Waldkirch
Germany
Legal information
T
his work is protected by copyright. Any rights derived from the copyright shall be
reserved for SICK AG. Reproduction of this document or parts of this document is
only permissible within the limits of the legal determination of Copyright Law. Any modi‐
fication, abridgment or translation of this document is prohibited without the express
written permission of SICK AG.
The trademarks stated in this document are the property of their respective owner.
© SICK AG. All rights reserved.
Original document
T
his document is an original document of SICK AG.
2
O P E R A T I N G I N S T R U C T I O N S | Safe AGV Easy 8026188/1BD7/2021-03-25 | SICK
Subject to change without notice

Contents
1 About this document........................................................................ 4
1.1 Scope......................................................................................................... 4
1.2 Symbols and document conventions...................................................... 4
2 Safety information............................................................................ 6
2.1 General safety note.................................................................................. 6
2.2 Intended use............................................................................................. 6
2.3 Requirements for the qualification of personnel.................................... 6
3 Product description........................................................................... 7
3.1 Construction.............................................................................................. 7
3.2 Functionality.............................................................................................. 7
3.3 Components.............................................................................................. 7
4 Project planning................................................................................ 9
4.1 Manufacturer of the overall system......................................................... 9
4.2 Operating entity of the overall system..................................................... 9
4.3 Design........................................................................................................ 9
4.4 Integrating the equipment into the electrical control............................. 11
5 For mounting the components........................................................ 31
6 Electrical installation of the components...................................... 32
7 Configuration..................................................................................... 33
8 Commissioning.................................................................................. 34
9 Operating the components.............................................................. 35
10 Maintenance of the components.................................................... 36
11 Troubleshooting the components................................................... 37
12 Technical data.................................................................................... 38
12.1 Data sheet................................................................................................. 38
13 Ordering information........................................................................ 39
13.1 Scope of delivery....................................................................................... 39
13.2 Ordering information Safe AGV Easy....................................................... 39
14 Accessories........................................................................................ 41
14.1 Accessories............................................................................................... 41
15 Spare parts......................................................................................... 42
15.1 Spare parts............................................................................................... 42
CONTENTS
8026188/1BD7/2021-03-25 | SICK O P E R A T I N G I N S T R U C T I O N S | Safe AGV Easy
3
Subject to change without notice

1 About this document
1.1 Scope
This document
T
hese operating instructions contain information regarding the Safe AGV Easy safety
system.
This document is included with the following SICK part numbers (this document in all
available language versions):
8026185
Further documents
NOTE
T
he operating instructions of the components also apply.
The relevant information must be made available to the employees for all work per‐
formed on the safety system.
The following documents contain additional information:
T
able 1: Available documents
Publication type Title Part number
Operating instructions microScan3 – EFI-pro 8021911
Operating instructions nanoScan3 I/O 8024594
Operating instructions S300 8010946
Operating instructions Flexi Soft modular safety con‐
t
roller hardware
8012999
Operating instructions Flexi Soft in Flexi Soft
D
esigner
8012998
Technical information EFI-pro 8022344
Special information Guide for Safe Machinery 8024365
1.2 Symbols and document conventions
The following symbols and conventions are used in this document:
Safety notes and other notes
DANGER
Indic
ates a situation presenting imminent danger, which will lead to death or serious
injuries if not prevented.
WARNING
Indic
ates a situation presenting possible danger, which may lead to death or serious
injuries if not prevented.
CAUTION
Indic
ates a situation presenting possible danger, which may lead to moderate or minor
injuries if not prevented.
1 ABOUT THIS DOCUMENT
4
O P E R A T I N G I N S T R U C T I O N S | Safe AGV Easy 8026188/1BD7/2021-03-25 | SICK
Subject to change without notice

NOTICE
Indic
ates a situation presenting possible danger, which may lead to property damage if
not prevented.
NOTE
Indic
ates useful tips and recommendations.
Instructions to action
b
T
he arrow denotes instructions to action.
1. The sequence of instructions for action is numbered.
2. Follow the order in which the numbered instructions are given.
✓
The check mark denotes the result of an instruction.
ABOUT THIS DOCUMENT 1
8026188/1BD7/2021-03-25 | SICK O P E R A T I N G I N S T R U C T I O N S | Safe AGV Easy
5
Subject to change without notice

2 Safety information
2.1 General safety note
The information and tools will not fulfill the safety requirements for your application
w
ithout further adjustments being made. The project planning provided by way of
example is intended to serve as the basis to allow you to perform your own project
planning and programming in line with your specific requirements. What this means is
that the information and tools merely provide an example to demonstrate how a safety
function can be taken care of.
When it comes to your own project planning and programming, you will need to rely
on qualified staff given that it is your responsibility to ensure that the following require‐
ments are complied with at the very least:
b
Carrying out a risk assessment
b
Taking into account applicable standards
b
Verifying and validating the safety functions.
2.2 Intended use
The safety system is used to carry out a sub-safety function for automated guided vehi‐
c
les and transport carts (AGVs and AGCs). It protects, by means of mobile hazardous
area protection, the hazardous area created by the movement of an automated guided
vehicle.
The safety system is an example application and must be independently implemented
and validated.
The safety system must only be used within the limits of the prescribed and specified
technical data and operating conditions at all times.
Incorrect use, improper modification or manipulation of the safety system will invalidate
any warranty from SICK; in addition, any responsibility and liability of SICK for damage
and secondary damage caused by this are excluded.
2.3 Requirements for the qualification of personnel
The protective device must be planned in, installed, connected, commissioned, and
ser
viced by qualified safety personnel only.
Project planning
For project planning, a person is considered competent when he/she has expertise and
experience in the selection and use of protective devices on machines and is familiar
with the relevant technical rules and national work safety regulations.
Mechanical mounting, electrical installation, and commissioning
F
or the task, a person is considered qualified when he/she has the expertise and
experience in the relevant field and is sufficiently familiar with the application of the
protective device on the machine to be able to assess whether it is in an operationally
safe state.
Operation and maintenance
F
or operation and maintenance, a person is considered competent when he/she has
the expertise and experience in the relevant field and is sufficiently familiar with the
application of the protective device on the machine and has been instructed by the
machine operator in its operation.
2 S
AFETY INFORMATION
6
O P E R A T I N G I N S T R U C T I O N S | Safe AGV Easy 8026188/1BD7/2021-03-25 | SICK
Subject to change without notice

3 Product description
3.1 Construction
The following elements work together:
•
2 × S
afety laser scanner (from SICK)
•
Flexi Soft safety controller (from SICK)
•
Safety encoder
•
2 × Motor contactor
•
2 × Braking contactor
2 × Safety laser scanner
Safety controller
Safety encoder
2 × Motor contactor
2× Brake contactor
Figure 1: Construction
3.2 Functionality
Overview
T
he areas in front of and behind the vehicle are monitored by safety laser scanners.
The speed of the vehicle is monitored by safety encoders. A safety controller evaluates
the safety laser scanner signals. If a person is present in the monitored area, the
vehicle should stop.
Safety functions that can be implemented
•
Initiate stop - forward travel
•
Initiate stop - backward travel
•
Monitor speed
Further topics
•
"S
afety functions that can be implemented", page 9
3.3 Components
Components relevant for the safety system
T
able 2: Hardware
Component Part of the safety sys‐
t
em?
Included in scope of
delivery
2 x safety laser scanner including system plug Yes Yes
1)
Flexi Soft safety controller Yes Yes
2)
Safety encoders Yes No
Motor contactor Yes No
Braking contactor Yes No
PRODUCT DESCRIPTION 3
8026188/1BD7/2021-03-25 | SICK O P E R A T I N G I N S T R U C T I O N S | Safe AGV Easy
7
Subject to change without notice

Component Part of the safety sys‐
t
em?
Included in scope of
delivery
AGV or AGC No No
1)
The type of safety laser scanner depends on the variant selected.
2)
The available options on the safety controller depends on the variant selected.
Implementing all the safety functions for the application requires a complete system
consis
ting of sensors, a controller, actuators, and control switches. The user is responsi‐
ble for the safe design of the complete system and all safety functions.
3 P
RODUCT DESCRIPTION
8
O P E R A T I N G I N S T R U C T I O N S | Safe AGV Easy 8026188/1BD7/2021-03-25 | SICK
Subject to change without notice

4 Project planning
4.1 Manufacturer of the overall system
The safety system was developed under consideration of typical application cases. A
par
tial safety function can be implemented with the safety system in these application
cases. The manufacturer must check whether the safety system is suitable for its
specific application case (risk assessment according to ISO 12100). Further protective
measures may be required in addition to the safety system.
If the thorough check shows that the safety system is not suitable for the specific
application case, the safety system can be used as a basis for an individualized devel‐
opment suitable for the specific application case. This case will not be considered
further in this document.
In any event, additional work is necessary for the safety system to be used, e.g.
subsequent configuration of the safety controller.
The manufacturer has the following duties:
b
Executing a risk assessment.
b
Verifying and validating the safety functions.
b
Integrating the individual components in accordance with the appropriate stand‐
ards.
b
Please note that C standards have priority compared to statements about this
safety system.
4.2 Operating entity of the overall system
Changes to the electrical integration of the safety system in the machine control and
c
hanges to the mechanical mounting of the safety system necessitate a new risk
assessment. The results of this risk assessment may require the entity operating the
machine to meet the obligations of a manufacturer.
Changes to the safety system’s configuration may impair the protective function. The
effectiveness of the safety system must be checked after any change to the configu‐
ration. The person carrying out the change is also responsible for maintaining the
protective function of the safety system.
4.3 Design
4.3.1 Safety functions that can be implemented
Overview
Y
ou can use the safety system, for example, to implement the following safety functions
at your own risk.
Initiate stop - forward travel
A s
top is initiated when something is detected in the protective field. Take the following
into consideration when integrating this function:
•
Only the front safety laser scanner is evaluated during forward travel.
•
The function must be active regardless of the operating mode.
•
The signal from the safety encoder can be used to adapt the size of the protective
field to the speed of the vehicle (field set switching).
Initiate stop - backward travel
A s
top is initiated when something is detected in the protective field. Take the following
into consideration when integrating this function:
PROJECT PLANNING 4
8026188/1BD7/2021-03-25 | SICK O P E R A T I N G I N S T R U C T I O N S | Safe AGV Easy
9
Subject to change without notice

•
Onl
y the rear safety laser scanner is evaluated during backward travel.
•
The function must be active regardless of the operating mode.
•
The signal from the safety encoder can be used to adapt the size of the protective
field to the speed of the vehicle (field set switching).
Monitor speed
T
he vehicle’s speed can be evaluated in order to trigger safety functions. For example, a
stop can be initiated if a defined speed is exceeded.
4 P
ROJECT PLANNING
10
O P E R A T I N G I N S T R U C T I O N S | Safe AGV Easy 8026188/1BD7/2021-03-25 | SICK
Subject to change without notice

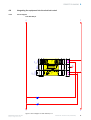
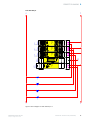
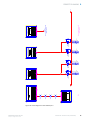
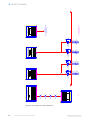
4.4 Integrating the equipment into the electrical control
4.4.1 Circuit diagram
Safe AGV Easy 4
Q3 Q4Q1 Q2
I8
FLEXI soft
XTIO
I7I6I5
I1 I2 I3 I4
MS
X1 X2 A1 A2
BA_HW-FLEXIsoft
FX3-XTIO84002
SICK.1044125
/6.0
/6.1
/2.3
-K110.2
A1
/2.3
+
A2
/2.3
-
A1 A2
A BA B
MS
CV
EFI1
EFI2
1-EFI-2
FLEXI soft
C
PU1
BA_HW-FLEXIsoft
FX3-CPU130002
SICK.1043784
SICK.1043700
/4.4
/
5.4
/2.1
-K110.0
A1
/
2.1
+
A2
/2.1
-
FLEXI soft
FX3-MOC0
MS
BA_HW-FLEXIsoft
FX3-MOC000000
SICK.1062344
-K110.1
D-SUB
1
2
-FC100
4A
1
2
-FC101
4A
0V
/ 4.0
0V_
/
24V_
/
24V
/ 4.0
Encoder
3.3
Figure 2: Circuit diagram for Safe AGV Easy 4-1
PROJECT PLANNING 4
8026188/1BD7/2021-03-25 | SICK O P E R A T I N G I N S T R U C T I O N S | Safe AGV Easy
11
Subject to change without notice

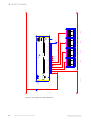
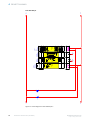
/1.5
A1
+
/1.5
A2
-
-K110.2
/1.5
FLEXI Soft FX3-XTIO
SICK.1044125
FX3-XTIO
EDM
/6.1
X
1
/6.2
X2
I1
I1
DI1
I2
I2
DI2
I3
I3
DI3
I4
I4
DI4
EDM
-QA120.2:62/6.1
I5
I5
DI5
I6
I6
DI6
I7
I7
DI7
I8
I8
DI8
Motor + Brake (Channel 1) contactor
-QA110.1:A1/6.3
Q1
Q1
DO1
Motor + Brake (Channel 2) contactor
-QA110.2:A1/6.5
Q2
Q2
DO2
Non-safe signal to standard PLC (WF/PF infringed)
/6.7
Q3
Q3
DO3
Q4
Q4
DO4
-K110.0
/1.4
FLEXI Soft FX3-CPU1
SICK.1043784
FX3-CPU1
/1.4
A1
+
/1.4
A2
-
EFI1_A
/4.5EFI_1_A
BUS
EFI1_B
/4.4EFI_1_B
BUS
EFI2_A
/5.5EFI_2_A
BUS
EFI2_B
/5.4EFI_2_B
BUS
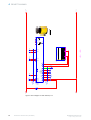
Figure 3: Circuit diagram for Safe AGV Easy 4-2
4 P
ROJECT PLANNING
12
O P E R A T I N G I N S T R U C T I O N S | Safe AGV Easy 8026188/1BD7/2021-03-25 | SICK
Subject to change without notice

M12
-BS150
COS +
2
SIN -
3
SIN +
4
Z_
5
COS -
1
Z
6
GND
7
US
8
SH
ENC1_A-
ENC1_A+
ENC1_B-
ENC1_B+
ENC_0V
ENC1_24V
Safety Encoder
DFS60S Pro
SH
Encoder
/ 1.4
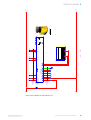
Figure 4: Circuit diagram for Safe AGV Easy 4-3
PROJECT PLANNING 4
8026188/1BD7/2021-03-25 | SICK O P E R A T I N G I N S T R U C T I O N S | Safe AGV Easy
13
Subject to change without notice

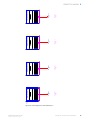
EFI1 A
Scanner 1
EFI1 B
Scanner 1
S30B-x011DA
13
4 2
M8x4
-BG110
SICK.1056429
S30B-3011DA
SICK.2034264
SX0B-B1505G
1-4
CONF
RS 422
RD
-WD100
YE WHGN
GY
-WD100
PK WHBK RDBU WHBN
15x20 AWG
UL2464 N.LSP
-WD100
BN BU GY PK GNWHBK RDBU WHBN
15x20 AWG
UL2464 N.LSP
-WD100
RD YE WHGN
11
RxD-
12
RxD+
23
TxD+
24
TxD-
WHBU WHGY WHVT WH
WHBU WHGY WHVT WH
5
UNI-I/O1/
RESET/C1
6
UNI-I/O2/
EDM
16
STBY
1
24VDC
2
0VDC
3
OSSD1
4
OSSD2
FE
FE
13
UNI-I/O3/
ERR/WEAK
15
UNI-I/O5/
RES_REQ/C2
14
UNI-I/O4/
WF
7
A1 INCA_0
8
A2
INCA_90
9
B1 INCB_0
10
B2
INCB_90
17
EFI A
18
EFI B
-K110.0
/1.4
FLEXI Soft FX3-CPU1
EFI1_A
/2.1
BUS
EFI_1_A
EFI1_B
/2.1
BUS
EFI_1_B
1
2
-FC104
4A
-XD1
1 2
PE
-XE1
/5.3
24V
/1.9
0V
/1.9
0V
/ 5.0
24V
/ 5.0
Figure 5: Circuit diagram for Safe AGV Easy 4-4
4 P
ROJECT PLANNING
14
O P E R A T I N G I N S T R U C T I O N S | Safe AGV Easy 8026188/1BD7/2021-03-25 | SICK
Subject to change without notice

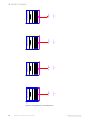
EFI2 A
Scanner 2
EFI2 B
Scanner 2
S30B-x011DA
13
4 2
M8x4
-BG120
SICK.1056429
S30B-3011DA
SICK.2034264
SX0B-B1505G
1-4
CONF
RS 422
RD
-WD101
YE WHGN
GY
-WD101
PK WHBK RDBU WHBN
15x20 AWG
UL2464 N.LSP
-WD101
BN BU GY PK GNWHBK RDBU WHBN
15x20 AWG
UL2464 N.LSP
-WD101
RD YE WHGN
11
RxD-
12
RxD+
23
TxD+
24
TxD-
WHBU WHGY WHVT WH
WHBU WHGY WHVT WH
5
UNI-I/O1/
RESET/C1
6
UNI-I/O2/
EDM
16
STBY
1
24VDC
2
0VDC
3
OSSD1
4
OSSD2
FE
FE
13
UNI-I/O3/
ERR/WEAK
15
UNI-I/O5/
RES_REQ/C2
14
UNI-I/O4/
WF
7
A1 INCA_0
8
A2
INCA_90
9
B1 INCB_0
10
B2
INCB_90
17
EFI A
18
EFI B
-K110.0
/1.4
FLEXI Soft FX3-CPU1
EFI2_A
/2.1
BUS
EFI_2_A
EFI2_B
/2.1
BUS
EFI_2_B
1
2
-FC105
4A
-XD1
11 12
PE
-XE1
/4.3
24V
/4.9
0V
/4.9
0V
/ 6.2
24V
/
Figure 6: Circuit diagram for Safe AGV Easy 4-5
PROJECT PLANNING 4
8026188/1BD7/2021-03-25 | SICK O P E R A T I N G I N S T R U C T I O N S | Safe AGV Easy
15
Subject to change without notice

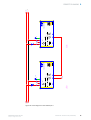
-K110.2
/1.5
FLEXI Soft FX3-XTIO
EDM
/2.3
X1
/2.3
X2
EDM Non-safe signal to standard PLC
(WF/PF infringed)
-K110.2
/1.5
FLEXI Soft FX3-XTIO
I5
DI5
/2.3
I5
EDM
FLEXI Soft FX3-XTIO
Motor + Brake (Chan
nel 1) contactor
Q1
/2.3
DO1
Q1
FLEXI Soft FX3-XTIO
Motor + Brake (Chan
nel 2) contactor
Q2
/2.3
DO2
Q2
FLEXI Soft FX3-XTIO
Non-safe signal to sta
ndard PLC (WF/PF inf
ringed)
Q3
/2.3
DO3
Q3
U U U U
A1
A2
-QA110.1
Motor contactor
1413
2423
3433
4443
5453
6261 /6.1
7473
8483
A1
A2
-QA110.2
Motor contactor
1413
2423
3433
4443
5453
6261 /6.1
7473
8483
A1
A2
-QA120.1
Brake contactor
1413
2423
3433
4443
5453
6261 /6.1
7473
8483
A1
A2
-QA120.2
Brake contactor
1413
2423
3433
4443
5453
6261 /6.1
7473
8483
61
62
-QA110.1
/6.3
61
62
-QA110.2
/6.5
61
62
-QA120.1
/6.4
61
62
-QA120.2
/6.6
0V
/5.9
0V
/
External
Non-safe signal to standard PLC
(WF/PF infringed)
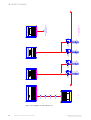
Figure 7: Circuit diagram for Safe AGV Easy 4-6
4 P
ROJECT PLANNING
16
O P E R A T I N G I N S T R U C T I O N S | Safe AGV Easy 8026188/1BD7/2021-03-25 | SICK
Subject to change without notice

Safe AGV Easy 5
Q3 Q4Q1 Q2
I8
FLEXI soft
XTIO
I7I6I5
I1 I2 I3 I4
MS
X1 X2 A1 A2
BA_HW-FLEXIsoft
FX3-XTIO84002
SICK.1044125
/9.0
/9.1
/2.3
-K110.2
A1
/
2.3
+
A2
/2.3
-
Q3 Q4Q1 Q2
I8
FLEXI soft
XTIO
I7I6I5
I1 I2 I3 I4
MS
X1 X2 A1 A2
BA_HW-FLEXIsoft
FX3-XTIO84002
SICK.1044125
/5.3
/7.1
/2.7
-K110.3
A1
/
2.7
+
A2
/2.7
-
Q3 Q4Q1 Q2
I8
FLEXI soft
XTIO
I7I6I5
I1 I2 I3 I4
MS
X1 X2 A1 A2
BA_HW-FLEXIsoft
FX3-XTIO84002
SICK.1044125
/6.3
/8.1
/3.3
-K110.4
A1
/
3.3
+
A2
/3.3
-
FLEXI soft
FX3-MOC0
MS
BA_HW-FLEXIsoft
FX3-MOC000000
SICK.1062344
-K110.1
D-SUB
A1 A2
MS
CV
FLEXI soft
CPU0
BA_HW-FLEXIsoft
SICK.1043783
SICK.1043700
/2.1
-K110.0
A1
/2.1
+
A2
/2.1
-
1
2
-FC100
4A
1
2
-FC101
4A
1
2
-FC102
4A
1
2
-FC103
4A
0V
/ 5.0
0V_
/
24V_
/
24V
/ 5.0
Encoder
4.3
Figure 8: Circuit diagram for Safe AGV Easy 5-1
PROJECT PLANNING 4
8026188/1BD7/2021-03-25 | SICK O P E R A T I N G I N S T R U C T I O N S | Safe AGV Easy
17
Subject to change without notice

/1.5
A1
+
/1.5
A2
-
-K110.2
/1.5
FLEXI Soft FX3-XTIO
SICK.1044125
FX3-XTIO
EDM
/9.1
X
1
/9.2
X2
I1
I1
DI1
I2
I2
DI2
I3
I3
DI3
I4
I4
DI4
EDM
-QA120.2:62/9.1
I5
I5
DI5
I6
I6
DI6
I7
I7
DI7
I8
I8
DI8
Motor + Brake (Channel 1) contactor
-QA110.1:A1/9.3
Q1
Q1
DO1
Motor + Brake (Channel 2) contactor
-QA110.2:A1/9.5
Q2
Q2
DO2
Non-safe signal to standard PLC (WF/PF infringed)
/9.7
Q3
Q3
DO3
Q4
Q4
DO4
-K110.3
/1.5
FLEXI Soft FX3-XTIO
SICK.1044125
FX3-XTIO
/1.5
A1
+
/1.6
A2
-
X1
X2
I1
I1
DI1
I2
I2
DI2
I3
I3
DI3
I4
I4
DI4
OSSD1A
-BG110:3/5.4
I5
I5
DI5
OSSD1B
-BG110:4/5.5
I6
I6
DI6
OSSD2A
-BG110:6/5.6
I7
I7
DI7
OSSD2B
-BG110:7/5.7
I8
I8
DI8
Scanner 1 B1
-BG110:5/7.1
Q1
Q1
DO1
Scanner 1 B2
-BG110:8/7.3
Q2
Q2
DO2
Scanner 1 C1
-BG110:9/7.5
Q3
Q3
DO3
Scanner 1 C2
-BG110:10/7.7
Q4
Q4
DO4
-K110.0
/1.4
SICK.1043783
FX3-CPU0
/1.4
A1
+
/1.4
A2
-
Figure 9: Circuit diagram for Safe AGV Easy 5-2
4 P
ROJECT PLANNING
18
O P E R A T I N G I N S T R U C T I O N S | Safe AGV Easy 8026188/1BD7/2021-03-25 | SICK
Subject to change without notice

Scanner 2 B2
-BG120:8/8.3
Q2
Q2
DO2
Scanner 2 C1
-BG120:9/8.5
Q3
Q3
DO3
Scanner 2 C2
-BG120:10/8.7
Q4
Q4
DO4
I1
I1
DI1
I2
I2
DI2
I3
I3
DI3
I4
I4
DI4
OSSD1A
-BG120:3/6.4
I5
I5
DI5
OSSD1B
-BG120:4/6.5
I6
I6
DI6
OSSD2A
-BG120:6/6.6
I7
I7
DI7
-K110.4
/1.6
FLEXI Soft FX3-XTIO
SICK.1044125
FX3-XTIO
/1.6
A1
+
/1.6
A2
-
OSSD2B
-BG120:7/6.7
I8
I8
DI8
Scanner 2 B1
-BG120:5/8.1
Q1
Q1
DO1
X1
X2
Figure 10: Circuit diagram for Safe AGV Easy 5-3
PROJECT PLANNING 4
8026188/1BD7/2021-03-25 | SICK O P E R A T I N G I N S T R U C T I O N S | Safe AGV Easy
19
Subject to change without notice

M12
-BS150
COS +
2
SIN -
3
SIN +
4
Z_
5
COS -
1
Z
6
GND
7
US
8
SH
ENC1_A-
ENC1_A+
ENC1_B-
ENC1_B+
ENC_0V
ENC1_24V
Safety Encoder
DFS60S Pro
SH
Encoder
/ 1.4
Figure 11: Circuit diagram for Safe AGV Easy 5-4
4 P
ROJECT PLANNING
20
O P E R A T I N G I N S T R U C T I O N S | Safe AGV Easy 8026188/1BD7/2021-03-25 | SICK
Subject to change without notice
La pagina sta caricando ...
La pagina sta caricando ...
La pagina sta caricando ...
La pagina sta caricando ...
La pagina sta caricando ...
La pagina sta caricando ...
La pagina sta caricando ...
La pagina sta caricando ...
La pagina sta caricando ...
La pagina sta caricando ...
La pagina sta caricando ...
La pagina sta caricando ...
La pagina sta caricando ...
La pagina sta caricando ...
La pagina sta caricando ...
La pagina sta caricando ...
La pagina sta caricando ...
La pagina sta caricando ...
La pagina sta caricando ...
La pagina sta caricando ...
La pagina sta caricando ...
La pagina sta caricando ...
La pagina sta caricando ...
La pagina sta caricando ...
-
 1
1
-
 2
2
-
 3
3
-
 4
4
-
 5
5
-
 6
6
-
 7
7
-
 8
8
-
 9
9
-
 10
10
-
 11
11
-
 12
12
-
 13
13
-
 14
14
-
 15
15
-
 16
16
-
 17
17
-
 18
18
-
 19
19
-
 20
20
-
 21
21
-
 22
22
-
 23
23
-
 24
24
-
 25
25
-
 26
26
-
 27
27
-
 28
28
-
 29
29
-
 30
30
-
 31
31
-
 32
32
-
 33
33
-
 34
34
-
 35
35
-
 36
36
-
 37
37
-
 38
38
-
 39
39
-
 40
40
-
 41
41
-
 42
42
-
 43
43
-
 44
44












































SICK Safe AGV Easy – Variant 4-6 Istruzioni per l'uso
- Tipo
- Istruzioni per l'uso
in altre lingue
Documenti correlati
-
SICK ReLy OSSD1 Operating Instructions Manual
-
-
-
-
-
-
-
-
-