
Istruzioni per l'uso
Sensore ottico di distanza
OPD100
11455579 / 00 04 / 2022
IT

2
Indice
1 Premessa.............................................................................................................4
1.1 Simboli utilizzati .............................................................................................4
1.2 Indicazioni di pericolo utilizzate .....................................................................4
2 Istruzioni di sicurezza ..........................................................................................4
3 Uso conforme ......................................................................................................5
3.1 Descrizione generale .....................................................................................5
3.1.1 Teach e profilo in altezza ......................................................................6
3.1.2 Funzionamento normale ....................................................................... 7
3.2 Interpretazione del valore di corrispondenza .................................................8
3.2.1 Fluttuazione del valore di corrispondenza ............................................8
3.3 Campi d’impiego ............................................................................................9
4 Funzione ............................................................................................................10
4.1 Tipologie di funzionamento .......................................................................... 10
4.1.1 Modalità di commutazione .................................................................. 10
4.1.2 Funzionamento con master IO-Link ................................................... 11
4.1.3 Funzionamento con software Vision Assistant e master IO-Link ........ 11
5 Montaggio ..........................................................................................................12
5.1 Condizioni di montaggio ..............................................................................12
5.2 Istruzioni di montaggio .................................................................................12
5.2.1 Inclinazione laterale ............................................................................ 12
5.2.2 Inclinazione frontale ............................................................................13
5.2.3 Saturazione e perdita di segnale ........................................................13
5.2.4 Evitare riflessioni multiple ...................................................................14
5.2.5 Evitare sporco e luce ambientale .......................................................14
6 Collegamento elettrico .......................................................................................15
6.1 Funzionamento con master IO-Link ............................................................16
7 Elementi di comando e di indicazione ...............................................................16
8 Messa in funzione ..............................................................................................17
8.1 Teach guidato ..............................................................................................18
8.1.1 Selezione della lingua .........................................................................19
8.1.2 Impostazione dell’oggetto ................................................................... 19
8.1.3 Definire la regione di interesse (ROI) .................................................19
8.1.4 Definire la posizione del profilo di riferimento .....................................21

3
IT
8.1.5 Soglia di commutazione .....................................................................22
8.1.6 Modo Run ...........................................................................................23
9 Menu ..................................................................................................................24
9.1 Funzioni base ..............................................................................................24
9.2 Funzioni ampliate ........................................................................................25
10 Tipi di funzionamento .......................................................................................27
10.1 Modalità continua ......................................................................................27
10.2 Modo trigger ..............................................................................................28
11 Parametrizzazione ...........................................................................................29
11.1 Parametrizzazione delle funzioni di base...................................................29
11.2 Parametrizzazione Funzioni ampliate ........................................................31
11.2.1 Sottomenu [Configurazione] ..................................................................... 32
11.2.2 Sottomenu [Display] ..........................................................................34
12 IO-Link .............................................................................................................34
12.1 Informazioni generali .................................................................................34
12.2 Informazioni specifiche per prodotto ..........................................................35
12.3 Strumenti di configurazione .......................................................................35
12.4 Gamma di funzioni .....................................................................................35
13 Eliminazione delle anomalie ............................................................................35
13.1 Indicazioni di anomalia sul display ............................................................35
13.2 Indicazioni di anomalia nel software "Vision Assistant" .............................36
13.3 Altri tipi di malfunzionamento ..................................................................... 37
14 Manutenzione, riparazione, smaltimento .........................................................39
15 Disegno tecnico ...............................................................................................39
16 Impostazione di fabbrica ..................................................................................40

4
1 Premessa
1.1 Simboli utilizzati
►Sequenza operativa
> Reazione, risultato
[…] Denominazione di tasti, pulsanti o indicazioni
→Riferimento
Nota importante
In caso di inosservanza possono verificarsi malfunzionamenti o anomalie.
Informazioni
Nota integrativa.
1.2 Indicazioni di pericolo utilizzate
AVVERTENZA
Pericolo di gravi danni alle persone. Non sono da escludere il
rischio di morte o gravi lesioni irreversibili.
2 Istruzioni di sicurezza
• Leggere questo manuale prima di mettere in funzione il prodotto. Assicurarsi
che il prodotto sia adeguato alle applicazioni in questione, senza limitazioni.
• L'uso inappropriato o non conforme può causare anomalie di funzionamento
del prodotto o ripercussioni inaspettate nella vostra applicazione. Per questo
è necessario che il montaggio, il collegamento elettrico, la messa in funzione,
l'uso e la manutenzione del prodotto vengano effettuati soltanto da personale
specializzato, addestrato e autorizzato dal gestore dell'impianto.
• In caso di malfunzionamento del dispositivo mettersi in contatto con il
produttore. Per interventi e/o modifiche sul prodotto si declina qualsiasi
responsabilità e garanzia.
Attenzione: in caso di utilizzo di elementi di comando e regolazione diversi
da quelli riportati in questa sede oppure di adozione di altre procedure può
verificarsi una pericolosa esposizione a radiazioni.

5
IT
Luce laser visibile; CLASSE LASER 1.
EN/IEC 60825-1 : 2007 ed EN/IEC 60825-1 : 2014
conforme a 21 CFR 1040 fatta eccezione per le divergenze
in accordo con la normativa Laser Notice n. 50, giugno 2007.
Posizione dell’etichetta del prodotto Cartello
3 Uso conforme
3.1 Descrizione generale
Il sensore proietta sull’oggetto una linea laser e tramite il principio di triangolazione
rileva il profilo in altezza dell’oggetto lungo la linea laser.
A tale proposito, l’oggetto da rilevare deve trovarsi nel campo operativo del
sensore.
Il sensore ha un campo operativo trapezoidale, così definito:
• Distanza dal sensore (direzione Z): 150…300 mm
• Lunghezza del profilo (direzione X):
- con una distanza dell’oggetto di 150 mm: 45 mm
- con una distanza dell’oggetto di 300 mm: 90 mm
ATTENZIONE
IIn ambienti domestici questa apparecchiatura può causare
interferenze radio, nel qual caso l'utente è tenuto a prendere
misure adeguate.

6
5
23
4
1
0
150
300 90
45
1: Asse X in [mm]
2: Asse Z in [mm]
3: Emettitore
4: Ricevitore
5: Indicatori ROI
Fig. 1
La linea laser proiettata è più larga del campo operativo. L’oggetto da
rilevare deve essere collocato al centro lungo la linea laser.
Nelle impostazioni di fabbrica il campo operativo viene circoscritto da due
indicatori ROI verticali proiettati in verde.
Gli indicatori ROI non vengono visualizzati se il sensore viene comandato
dal software "Vision Assistant".
3.1.1 Teach e profilo in altezza
Nella prima fase operativa viene impostato il sensore (funzione Teach). Per prima
cosa, viene registrato l’intero profilo in altezza rilevato dalla linea laser. Quindi
l’utente ha la possibilità di circoscrivere ulteriormente la regione di interesse (ROI).
- Il profilo in altezza da questa ROI viene poi salvato come profilo di riferimento.
Nella fase successiva, il sensore rileva continuamente profili in altezza e
li confronta con il profilo di riferimento impostato, generando un valore di
corrispondenza. A questo punto, l’utente ha la possibilità di definire una soglia di
commutazione (→ 3.2).

7
IT
1
2
3
4
0
150
300
ROI
1: Asse X in [mm]
2: Asse Z in [mm]
3: Sensore
4: Prolo di
riferimento
Fig. 2
3.1.2 Funzionamento normale
Nel funzionamento normale il sensore rileva in modo continuo o a impulsi i profili
in altezza e li confronta con il profilo di riferimento impostato per generare un
valore di corrispondenza.
Utilizzando il software "Vision Assistant", vengono inoltre trasmesse immagini del
profilo ad alta risoluzione (→ 4.1.3). I profili in altezza vengono referenziati alla
distanza di misura max. = 300 mm (altezza di riferimento). Il punto di riferimento
dell’altezza di riferimento è il punto zero ottico dell’emettitore. L’emettitore si trova
all’interno del sensore.
Esempio: Un oggetto si trova a circa 200 mm di distanza dal sensore. Nel
software "Vision Assistant" il profilo in altezza viene indicato con un’altezza base
di circa 100 mm.
- Le altezze del profilo sono riferite all’altezza di riferimento, quindi hanno valori
assoluti positivi.
- Le indicazioni riportate nelle schede tecniche si riferiscono alle dimensioni
dei profili dell’oggetto e non alle loro distanze assolute dal sensore. I profili
dell’oggetto vengono rappresentati indipendentemente dalla loro posizione nel
campo operativo, con dimensioni reali (larghezza / altezza del profilo dell’oggetto).

8
3.2 Interpretazione del valore di corrispondenza
Il profilo misurato in altezza (in seguito definito anche "profilo") viene confrontato
internamente con un profilo di riferimento impostato. Il grado di corrispondenza
viene generato come valore interno (valore di corrispondenza).
Il valore letto determinato dal sensore costituisce quindi il grado di corrispondenza
del profilo misurato rispetto al profilo di riferimento impostato.
Valore di corrispondenza
trasmesso in [%]
Descrizione
100 Il profilo misurato corrisponde al 100% con il
profilo di riferimento impostato.
50 Il profilo misurato corrisponde al 50% con il
profilo di riferimento impostato.
Il valore di corrispondenza tollerabile deve essere determinato dall’utente
durante la messa in funzione e va utilizzato come soglia di commutazione
per la seguente differenziazione:
• Pezzi corrispondenti
• Pezzi non corrispondenti
Il passaggio tra pezzi corrispondenti e pezzi non corrispondenti viene
stabilito tramite misurazione e utilizzato come soglia di commutazione
idonea.
Non vi è una raccomandazione generale per una soglia di commutazione.
Va determinata nel rispettivo caso applicativo.
3.2.1 Fluttuazione del valore di corrispondenza
Nel valore di corrispondenza misurato vengono rilevate fluttuazioni naturali
(rumore, deriva).
Queste fluttuazioni del valore fanno sì che il valore di corrispondenza sia di regola
< 100%, persino quando si misura nuovamente l’oggetto impostato.
La tolleranza di misura con la quale il sensore rileva i profili in altezza è descritta
con i seguenti indicatori:
Gz - precisione in direzione Z (altezza profilo)
Gx - precisione in direzione X (larghezza profilo)

9
IT
3
1
4
2
5
6
1: Sensore
2: Tolleranza di misura
3: Prolo dell’oggetto
4: Campo operativo
5: Precisione in direzione Z (Gz)
6: Precisione in direzione X (Gx)
Fig. 3
Pertanto, Gz / Gx definiscono anche:
• l’altezza dell’oggetto minima, rilevabile in modo affidabile
• la larghezza dell’oggetto minima, rilevabile in modo affidabile
I profili in altezza vengono rilevati internamente dal sensore con una
risoluzione superiore a Gz / Gx. Questo consente di rilevare le variazioni in
altezza/larghezza dell’oggetto all’interno della tolleranza di misura.
3.3 Campi d’impiego
Il sensore ottico viene utilizzato principalmente per garantire la qualità del
processo ai fini di un monitoraggio delle forme del pezzo e del rilevamento di
anomalie.
Esempi:
- Monitoraggio della qualità della lavorazione, ad es. il diametro dei fori.
- Monitoraggio dei pezzi in funzione di una lavorazione non corretta, ad es.
assenza di fori.

10
Durante la misurazione il pezzo in lavorazione deve risultare fermo.
• Nelle situazioni statiche va selezionata la modalità di misurazione
continua. Il sensore controlla permanentemente il pezzo in lavorazione
e comunica gli eventuali scostamenti rispetto al profilo di riferimento
impostato (→ 10.1).
• Nelle situazioni dinamiche va selezionata la modalità trigger. Un
sistema di controllo superiore decide quando debba avvenire il
rilevamento, assicurando così che il pezzo in lavorazione si trovi nel
campo di rilevamento e sia fermo (→ 10.2).
4 Funzione
Il sensore ottico rileva il profilo in altezza dell’oggetto nel campo operativo, in
modo continuo o a impulsi, in base al principio della triangolazione. Inoltre, il
sensore ottico dispone di un’interfaccia IO-Link.
Il sensore può essere utilizzato in tre diverse modalità:
• Modalità di commutazione (→ 4.1.1)
• Funzionamento con master IO-Link (→ 4.1.2)
• Funzionamento con Vision Assistant tramite interfaccia IO-Link (→ 4.1.3)
4.1 Tipologie di funzionamento
4.1.1 Modalità di commutazione
Nella modalità di commutazione il sensore è collegato direttamente al sistema di
controllo processo e trasmette l’informazione per pezzo corrispondente / pezzo
non corrispondente tramite l’uscita di commutazione.
Tramite i segnali di commutazione sull’uscita di commutazione 1 / 2
viene segnalato se il valore impostato della soglia di commutazione
viene superato per eccesso o per difetto. Le uscite di commutazione si
comportano in modo antivalente (→ 6 Collegamento elettrico).
Il momento della misurazione può essere controllato in via opzionale da un’unità
di controllo del processo tramite ingresso trigger (pin 5). Il sensore segnala l'avvio
corretto della misurazione e la presenza dell’informazione di commutazione
tramite l’uscita di commutazione 2. L’unità di controllo superiore definisce
pienamente il tempo di rilevamento (→ 10.2)

11
IT
4.1.2 Funzionamento con master IO-Link
Se il sensore viene collegato a un master IO-Link, la parametrizzazione,
l'attivazione e il rilevamento dati si svolgono completamente tramite IO-Link. I
dati di processo ciclici contengono il valore di corrispondenza e l’informazione di
commutazione (pezzo corrispondente / pezzo non corrispondente).
Tramite IO-Link sono disponibili funzioni ampliate:
- Rilevamento del numero di trigger
- Identificazione dispositivo
Per ulteriori informazioni → www.ifm.com → Scheda tecnica.
4.1.3 Funzionamento con software Vision Assistant e master IO-Link
Tramite il protocollo IO-Link vengono trasmesse continuamente immagini del
profilo ad alta risoluzione. I dati delle immagini di un profilo vengono suddivisi in
più pacchetti e trasmessi successivamente in frame di dati IO-Link.
Il pacchetto software ifm Vision Assistant contiene un gestore di protocollo
corrispondente che assembla le immagini del profilo per poi visualizzarle.
Questo funzionamento semplifica la procedura teach (Teach guidato), dato che
sulla base delle immagini del profilo vengono visualizzati in modo chiaro il campo
di rilevamento del sensore e la valutazione dei profili.
Requisiti:
- Master IO-Link
- Software di configurazione "ifm Vision Assistant" (E3D300)
Con il pacchetto software Vision Assistant sono disponibili funzioni ampliate:
- Visualizzazione della regione di interesse (ROI) nelle immagini del profilo ad
alta risoluzione, per consentire un’impostazione molto precisa.
- Informazioni dettagliate di stato, utili in caso di complesse situazioni di
misurazione.
Il profilo può essere visualizzato anche con un software specifico del
cliente. Per le informazioni necessarie a tale proposito si prega di
consultare l’IODD.
Per ulteriori informazioni → www.ifm.com → Vision Assistant.

12
5 Montaggio
5.1 Condizioni di montaggio
►Montare il prodotto in modo tale che l’oggetto da rilevare si trovi nel campo di
rilevamento del sensore.
►Per il montaggio diretto, fissare il prodotto con due viti M4.
Per ulteriori accessori → www.ifm.com → Scheda tecnica → Accessori.
5.2 Istruzioni di montaggio
5.2.1 Inclinazione laterale
1
1: Zona morta a causa
dell’ombreggiatura
Fig. 4
Collocare il sensore in modo quanto più verticale possibile rispetto all'oggetto da
rilevare. In caso di inclinazione laterale (→ Fig. 4) e bordi dell’oggetto verticali la
linea laser viene parzialmente interrotta. In questa zona non è possibile rilevare il
profilo. Riducendo l’angolo d’inclinazione è possibile prevenire in tal senso.

13
IT
5.2.2 Inclinazione frontale
1
2
3
1: Emettitore
2: Ricevitore
3: Linea laser interrotta
Fig. 5
In caso di inclinazione del sensore in avanti o all’indietro è necessario assicurarsi
che la linea laser riflessa dall’oggetto possa essere rilevata dal ricevitore → Fig. 5.
Riducendo l’angolo d’inclinazione o ruotando il sensore di 180° si può assicurare
che il ricevitore rilevi la linea laser.
Il ricorso al software "Vision Assistant" semplifica l’identificazione di questi
casi problematici.
5.2.3 Saturazione e perdita di segnale
Il sensore regola automaticamente il tempo di esposizione per il rilevamento del
profilo in altezza, evitando così lo stato di saturazione.
Le superfici molto riflettenti riflettono la luce laser con estremi contrasti in direzione
del sensore. In alcuni casi questo significa che non è più possibile rilevare singoli
punti all’interno della regione di interesse (ROI).
Modificando leggermente la posizione del sensore è possibile evitare perdite di
segnale:
• Inclinazione laterale o frontale del sensore
• Aumento o riduzione della distanza dall’oggetto

14
5.2.4 Evitare riflessioni multiple
1
2
3
1: Sensore
2: Oggetto
3: Riessione multipla
Fig. 6
►Modificare leggermente la posizione del sensore, ad es. inclinare il sensore di
lato o di fronte, aumentare / ridurre la distanza dall’oggetto.
5.2.5 Evitare sporco e luce ambientale
È preferibile orientare i sensori ottici con la lente rivolta verso il basso oppure
parallela al suolo.
Motivo:
• I sensori ottici sono sensibili all’irradiazione diretta di fonti luminose. Le fonti
luminose comuni (lampade, sole) irradiano normalmente dall’alto.
• I sensori ottici reagiscono in modo sensibile allo sporco, in quanto riduce la
capacità di riserva.
I depositi di polvere si possono ridurre con un orientamento verso il basso o
di lato. Ciò consente intervalli di pulizia più lunghi.
Occorre fare attenzione che i sensori montati con la lente rivolta verso l’alto
non siano orientati verso abbaini o plafoniere.

15
IT
6 Collegamento elettrico
Il prodotto deve essere installato soltanto da personale specializzato.
►Osservare le disposizioni nazionali ed internazionali per l’installazione di
impianti di elettrotecnica.
►Garantire la tensione di alimentazione secondo EN 50178, SELV, PELV.
OPD100: cULus, supply class 2
►Disinserire la tensione dall'impianto.
►Collegare il prodotto come descritto di seguito:
OPD100 PNP/NPN
4
21
3
5
L
1
2
4
5
3
OUT2
OUT1
IN1
L+
Colori dei fili dei connettori femmina ifm:
1 = BN (marrone), 2 = WH (bianco), 3 = BU (blu), 4 = BK (nero), 5 = GR (grigio).
Pin Modalità continua
(impostazione di fabbrica)
Modalità trigger
1 VDD VDD
2 OUT2 = uscita di commutazione OUT2 = segnale di disponibilità
(uscita di commutazione)
3 GND GND
4 OUT1 = uscita di commutazione /
IO-Link
OUT1 = uscita di commutazione /
IO-Link
5 Ingresso trigger del PLC Ingresso trigger del PLC
Nel tipo di funzionamento "Modalità continua" OUT1 e OUT2 sono
configurate come uscite di commutazione antivalenti (→ 10.1)
Nel tipo di funzionamento "Modalità trigger" OUT2 è configurata come
segnale di disponibilità (→ 10.2).

16
Le uscite antivalenti trasmettono la stessa informazione del
sensore con livelli logici opposti. Ciò significa che sono disponibili,
contemporaneamente, un’uscita di commutazione NC e un’uscita di
commutazione NO.
OUT1 può essere utilizzata ad es. per rilevare i pezzi corrispondenti,
mentre OUT2 può segnalare i pezzi non corrispondenti.
6.1 Funzionamento con master IO-Link
Il dispositivo è compatibile con IO-Link, classe per porta master A (tipo A).
In caso di esercizio con IO-Link, classe per porta master B (tipo B), tenere
presente quanto segue:
Come standard, il dispositivo non è compatibile con la classe per porta
master B (tipo B). Pin 2 e pin 5 vengono utilizzati per funzioni proprietarie
specifiche. La separazione galvanica della tensione di alimentazione
principale del dispositivo dalla tensione supplementare (classe per porta
master B su pin 2/5) è perciò impossibile.
La seguente configurazione consente di utilizzare il dispositivo con la classe per
porta master B:
• Collegare dispositivo e master IO-Link tramite 3 cavi: collegare pin 1, 3 e 4 del
dispositivo con il master IO-Link (non collegare pin 2 e 5).
7 Elementi di comando e di indicazione
1
2
34
5
6
1: 1x LED giallo Stato di commutazione OUT1

17
IT
2: 1x LED verde LED acceso = Power
3: Display grafico Indicazione del valore di corrispondenza misurato.
4: Pulsante di
programmazione
[ENTER]
Selezione dei parametri e conferma dei valori parametrici.
5: Pulsante
Freccia in alto
Impostazione dei valori parametrici (in modo continuo tenendo
premuto il pulsante; in modo graduale premendo ripetutamente).
6: Pulsante
Freccia in basso
Impostazione dei valori parametrici (in modo continuo tenendo
premuto il pulsante; in modo graduale premendo ripetutamente).
8 Messa in funzione
►In seguito al montaggio, al collegamento elettrico e alla programmazione
controllare se il sensore funziona correttamente.
> Se la messa in funzione è corretta, il sensore avvia il "Teach guidato" (→ 8.1).
Le impostazioni eseguite per ultime vengono salvate internamente dal sensore.
Anche quando il sensore viene riacceso dopo un reset, viene avviato
il "Teach guidato", dato che il profilo di riferimento impostato viene
cancellato in caso di reset.
Durata d'uso di un diodo laser: 50000 ore
Dopo una corretta configurazione, il sensore non va più spostato. Qualsiasi
modifica alla posizione del sensore causa un rilevamento non più affidabile
del profilo di riferimento impostato.
Ogni volta che si cambia la posizione il sensore va configurato di nuovo.
Il sensore richiede una fase di avvio di ≥ 10 min. I parametri di potenza
specificati nella scheda tecnica si intendono validi soltanto una volta
ultimata questa fase di riscaldamento. Anche gli oggetti devono essere
impostati a riscaldamento avvenuto.

18
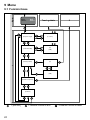
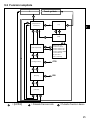
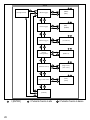
8.1 Teach guidato
Teach guidato
1
[Welcome, choose
your language]
[English]
[Deutsch]
[Français]
[...]
[Posiziona l'oggetto
e premi Conferma] [Salvare questo prolo
dell'oggetto?]
[Indietro]
[Conferma]
[Indietro]
[Regione di interesse]
[Posizione prolo
di riferimento] 90%100%
[Denisci ROI]
[Conferma]
[Indietro]
[Fluttuante]
[Fisso]
[Indietro]
[Imposta soglia ]
[Salva impostazioni]
[Indietro]
100
%
85%
RUN
85%90%
= [ENTER] = Pulsante Freccia in alto = Pulsante Freccia in basso

19
IT
8.1.1 Selezione della lingua
►Attivare il sensore.
> Le lingue disponibili sono visualizzate sul display.
►Selezionare la lingua desiderata con i pulsanti Freccia in alto / Freccia in basso
e cliccare [ENTER].
8.1.2 Impostazione dell’oggetto
Nella fase successiva viene impostato il profilo.
> Sul display compare [Posiziona l’oggetto e premi Conferma].
> Il sensore emette una linea laser rossa con due indicatori ROI verdi.
►Posizionare il sensore in modo che la linea laser copra il campo da controllare
e l’oggetto venga a trovarsi all’interno del campo operativo da 150 a 300 mm
→ 3.1 → Fig. 1.
►Avviare la procedura Teach premendo [ENTER].
> Il sensore misura più volte il profilo dell’oggetto / dello sfondo.
►Con i pulsanti Freccia in alto / Freccia in basso, selezionare [Conferma] oppure
[Indietro] e premere [ENTER].
- [Conferma]: il profilo impostato viene salvato.
- [Indietro]: impostare nuovamente il profilo.
Durante la misurazione non muovere l’oggetto. La fine della misurazione
non è indicata soltanto sul display ma viene segnalata anche dalla linea
laser che lampeggia due volte.
Se l’oggetto da rilevare non si trova nel campo operativo (ad es. più vicino
di 150 mm o più lontano di 300 mm) la procedura Teach viene interrotta. Il
messaggio [Oggetto fuori dal range] viene visualizzato per tre secondi. A
seguire viene avviata una nuova procedura Teach.
8.1.3 Definire la regione di interesse (ROI)
Il sensore consente di selezionare una regione di interesse (ROI) su una parte
del profilo in altezza impostato. La sezione del profilo compresa nella ROI viene
salvata come profilo di riferimento e successivamente utilizzata per determinare il
valore di corrispondenza.
Sulla base di questa limitazione, la valutazione del profilo in altezza può
essere ridotta alla sezione pertinente. Gli scostamenti in punti irrilevanti
non vengono presi in considerazione.

20
Nella fase successiva viene definita la regione di interesse (ROI).
> Il display visualizza le opzioni [Definisci ROI] e [Indietro].
►Con i pulsanti Freccia in alto / Freccia in basso, selezionare [Definisci ROI]
oppure [Indietro] e premere [ENTER].
- [Definisci ROI ]: definire una regione di interesse (ROI) dall'intero profilo.
- [Indietro]: impostare nuovamente il profilo.
> Sul display viene visualizzato [Imposta
punto ROI sinistra]
►Spostare la lineetta con i pulsanti
Freccia in alto / Freccia in basso.
> La lineetta a sinistra si sposta.
►Dopo aver raggiunto la posizione
desiderata, confermare con [ENTER].
> La posizione della lineetta a sinistra è
così impostata.
> La sezione circoscritta viene rilevata
nuovamente (nuovo profilo).
> Sul display viene visualizzato [Imposta
punto ROI destra].
►Spostare la lineetta con i pulsanti
Freccia in alto / Freccia in basso.
> La lineetta a destra si sposta.
►Dopo aver raggiunto la posizione
desiderata, confermare con [ENTER].
> La posizione della lineetta a destra è
così impostata.
> La sezione circoscritta viene rilevata
nuovamente (nuovo profilo).
Linea rossa sul display: rappresenta la sezione rilevata dalla linea laser.
Indicatore bianco: rappresenta la linea fissa.
Freccia verde: rappresenta la lineetta da spostare.
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
-
 1
1
-
 2
2
-
 3
3
-
 4
4
-
 5
5
-
 6
6
-
 7
7
-
 8
8
-
 9
9
-
 10
10
-
 11
11
-
 12
12
-
 13
13
-
 14
14
-
 15
15
-
 16
16
-
 17
17
-
 18
18
-
 19
19
-
 20
20
-
 21
21
-
 22
22
-
 23
23
-
 24
24
-
 25
25
-
 26
26
-
 27
27
-
 28
28
-
 29
29
-
 30
30
-
 31
31
-
 32
32
-
 33
33
-
 34
34
-
 35
35
-
 36
36
-
 37
37
-
 38
38
-
 39
39
-
 40
40








































Documenti correlati
-
IFM O2D540 Istruzioni per l'uso
-
IFM O3D300 Istruzioni per l'uso
-
-
IFM O3D305 Istruzioni per l'uso
-
IFM SI5010 Istruzioni per l'uso
-
IFM O2D532 Istruzioni per l'uso
-
IFM SA5000 Istruzioni per l'uso
-
-
IFM LMT105 Istruzioni per l'uso
-
Altri documenti
-
Roche cobas p 612 LCP1 Guida utente
-
Videotec NXPTZT Manuale utente
-
Eurotherm Regolatori programmabili EPC3000 EPC3016, EPC3008, EPC3004 Manuale del proprietario
-
Samsung SONOACE R5 Manuale utente
-
-
Garmin fēnix® 6X - Pro and Sapphire Editions Manuale del proprietario
-
Garmin Descent Mk2 Manuale del proprietario
-
Gossen MetraWatt R2700 Istruzioni per l'uso
-
Garmin MARQ Driver Performance versija Manuale del proprietario
-
Garmin MARQ Athlete laida Performance Manuale del proprietario