La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...

28
Indice: pag.
1 Avvertenze 29
2 Descrizione prodotto e destinazione d’uso 30
2.1 Limiti d’impiego 30
2.2 Impianto tipico 32
2.3 Elenco cavi 32
3 Installazione 33
3.1 Verifiche preliminari 33
3.2 Fissaggio del motoriduttore 33
3.3 Fissaggio delle staffe di finecorsa nelle
versioni con finecorsa induttivo 34
3.4 Installazione dei vari dispositivi 35
3.5 Collegamenti elettrici 35
3.6 Descrizione dei collegamenti elettrici 36
4 Verifiche finali ed avviamento 36
4.1 Selezione della direzione 36
4.2 Allacciamento dell’alimentazione 36
4.3 Apprendimento dei dispositivi 36
4.4 Apprendimento lunghezza dell’anta 37
4.5 Verifica del movimento del cancello 37
4.6 Funzioni preimpostate 37
4.7 Ricevitore radio 37
5 Collaudo e messa in servizio 37
5.1 Collaudo 38
5.2 Messa in servizio 38
6 Manutenzione e smaltimento 38
6.1 Manutenzione 38
6.2 Smaltimento 38
7 Approfondimenti 39
7.1 Tasti di programmazione 39
7.2 Programmazioni 39
7.2.1 Funzioni primo livello (funzioni ON-OFF) 39
7.2.2 Programmazione primo livello
(funzioni ON-OFF) 40
7.2.3 Funzioni secondo livello
(parametri regolabili) 40
7.2.4 Programmazione secondo livello
(parametri regolabili) 41
7.2.5 Esempio di programmazione primo livello
(funzioni ON-OFF) 42
7.2.6 Esempio di programmazione secondo livello
(parametri regolabili) 42
7.3 Aggiunta o rimozione dispositivi 42
7.3.1 BlueBUS 42
7.3.2 Ingresso STOP 43
7.3.3 Fotocellule 43
7.3.4 Fotocellula FT210B 43
7.3.5 ROBUS in modalità “Slave” 44
7.3.6 Apprendimento altri dispositivi 45
7.4 Funzioni particolari 45
7.4.1 Funzione “Apri sempre” 45
7.4.2 Funzione “Muovi comunque” 45
7.4.3 Avviso di manutenzione 45
7.5 Collegamento altri dispositivi 46
7.6 Risoluzione dei problemi 47
7.6.1 Elenco storico anomalie 47
7.7 Diagnostica e segnalazioni 47
7.7.1 Segnalazioni con il lampeggiante 48
7.7.2 Segnalazioni sulla centrale 48
7.8 Accessori 49
8 Caratteristiche tecniche 50
Istruzioni ed avvertenze destinate all’utilizzatore del
motoriduttore ROBUS 51
Robus
600/600P
1000/1000P

29
1) Avvertenze
Questo manuale di istruzioni contiene importanti informazioni riguardan-
ti la sicurezza per l'installazione, è necessario leggere tutte le istruzioni
prima di procedere all'installazione. Conservare con cura questo manua-
le anche per utilizzi futuri.
Considerando i pericoli che si possono verificare durante l'installazione e
l'uso di ROBUS, per la massima sicurezza è necessario che l'installazio-
ne avvenga nel pieno rispetto di leggi, norme e regolamenti. In questo
capitolo verranno riportate avvertenze di tipo generico; altre importanti
avvertenze sono presenti nei capitoli “3.1 Verifiche preliminari”; “5 Col-
laudo e messa in servizio”.
Secondo la più recente legislazione europea, l'automazio-
ne di una porta o cancello ricade in quanto previsto dalla
Direttiva 98/37/CE (Direttiva Macchine) e nel particolare, alle
norme: EN 13241-1 (norma armonizzata); EN 12445; EN
12453 ed EN 12635, che consentono di dichiarare la confor-
mità alla direttiva macchine
Ulteriori informazioni, linee guida all'analisi dei rischi ed alla realizzazione
del Fascicolo Tecnico, sono disponibili su:“www.niceforyou.com”. Il pre-
sente manuale è destinato solamente al personale tecnico qualificato per
l'installazione. Salvo lo specifico allegato da staccare a cura dell'installa-
tore “Istruzioni ed avvertenze destinate all'utilizzatore del motoriduttore
ROBUS” nessuna altra informazione contenuta nel presente fascicolo
può essere considerata d'interesse per l'utilizzatore finale!
• L'uso di ROBUS diverso da quanto previsto in queste istruzioni è vie-
tato; usi impropri possono essere causa di pericoli o danni a persone
e cose.
• Prima di iniziare l'installazione è necessario eseguire l'analisi dei rischi
che comprende l'elenco dei requisiti essenziali di sicurezza previsti nel-
l'allegato I della Direttiva Macchine, indicando le relative soluzioni adot-
tate.
Si ricorda che l'analisi dei rischi è uno dei documenti che costituisco-
no il “fascicolo tecnico” dell'automazione.
• Verificare la necessità di ulteriori dispositivi per completare l'automa-
zione con ROBUS in base alla specifica situazione d'impiego ed ai
pericoli presenti; devono essere considerati ad esempio i rischi di
impatto, schiacciamento, cesoiamento, convogliamento, ecc., ed altri
pericoli in genere.
• Non eseguire modifiche su nessuna parte se non previste nelle pre-
senti istruzioni; operazioni di questo tipo possono solo causare mal-
funzionamenti; NICE declina ogni responsabilità per danni derivati da
prodotti modificati.
• Durante l'installazione e l'uso evitare che parti solide o liquidi possano
penetrare all'interno della centrale e di altri dispositivi aperti; eventual-
mente rivolgersi al servizio di assistenza NICE; l'uso di ROBUS in que-
ste situazioni può causare situazioni di pericolo
• L'automatismo non può essere utilizzato prima di aver effettuato la
messa in servizio come specificato nel capitolo: “5 Collaudo e messa
in servizio”.
• Il materiale dell'imballaggio di ROBUS deve essere smaltito nel pieno
rispetto della normativa locale.
• Nel caso di guasto non risolvibile facendo uso delle informazioni ripor-
tate nel presente manuale, interpellare il servizio di assistenza NICE.
• Qualora si verifichino interventi di interruttori automatici o di fusibili, pri-
ma di ripristinarli è necessario individuare ed eliminare il guasto.
• Prima di accedere ai morsetti interni al coperchio di ROBUS scollega-
re tutti i circuiti di alimentazione; se il dispositivo di sconnessione non
è a vista apporvi un cartello: “ATTENZIONE MANUTENZIONE IN COR-
SO”.
Avvertenze particolari sull'idoneità all'uso di questo prodotto in relazione
alla Direttiva "Macchine" 98/37/CE (ex 89/392/CEE):
• Questo prodotto viene immesso sul mercato come "componente di
macchina" e quindi costruito per essere incorporato in una macchina
o per essere assemblato con altri macchinari al fine di realizzare "una
macchina" ai sensi della Direttiva 98/37/CE solo in abbinamento agli
altri componenti e nei modi così come descritto nel presente manuale
di istruzioni. Come previsto dalla direttiva 98/37/CE si avverte che non
è consentita la messa in servizio di questo prodotto finché il costrutto-
re della macchina, in cui questo prodotto è incorporato, non l'ha iden-
tificata e dichiarata conforme alla direttiva 98/37/CE.
Avvertenze particolari sull'idoneità all'uso di questo prodotto in relazione
alla Direttiva "Bassa Tensione" 73/23/CEE e successive modifiche
93/68/CEE:
• Questo prodotto risponde ai requisiti previsti dalla Direttiva "Bassa Ten-
sione" se impiegato per l'uso e nelle configurazioni previste in questo
manuale di istruzioni ed in abbinamento con gli articoli presenti nel
catalogo prodotti di Nice S.p.a. Potrebbero non essere garantiti i requi-
siti se il prodotto è usato in configurazioni o con altri prodotti non pre-
visti; è vietato l'uso del prodotto in queste situazioni finchè chi esegue
l'installazione non abbia verificato la rispondenza ai requisiti previsti
dalla direttiva.
Avvertenze particolari sull'idoneità all'uso di questo prodotto in relazione
alla Direttiva "Compatibilità Elettromagnetica" 89/336/CEE e successiva
modifiche 92/31/CEE e 93/68/CEE:
• Questo prodotto è stato sottoposto alle prove relative alla compatibi-
lità elettromagnetica nelle situazioni d'uso più critiche, nelle configura-
zioni previste in questo manuale di istruzioni ed in abbinamento con gli
articoli presenti nel catalogo prodotti di Nice S.p.a. Potrebbe non esse-
re garantita la compatibilità elettromagnetica se il prodotto è usato in
configurazioni o con altri prodotti non previsti; è vietato l'uso del pro-
dotto in queste situazioni finchè chi esegue l'installazione non abbia
verificato la rispondenza ai requisiti previsti dalla direttiva.
!
I

30
ROBUS è una linea di motoriduttori elettromeccanici irreversibili,
destinati all'automazione di cancelli scorrevoli. Dispongono di una
centrale elettronica di controllo e di un connettore per il ricevitore del
radiocomando SMXI o SMXIS (opzionali). I collegamenti elettrici ver-
so i dispositivi esterni sono semplificati grazie all'uso di “BlueBUS”,
una tecnica che permette di collegare più dispositivi con soli 2 fili.
ROBUS funzionano mediante energia elettrica, in caso di mancanza
di alimentazione dalla rete elettrica, è possibile effettuare lo sblocco
mediante apposita chiave e muovere manualmente il cancello;
oppure è possibile usare l'accessorio opzionale: batteria tampone
PS124 che permette alcune manovre anche in assenza di alimenta-
zione da rete.
Della linea ROBUS fanno parte i prodotti le cui differenze principali sono descritte in tabella 1.
Nota: 1Kg = 9,81N quindi, ad esempio: 600N = 61Kg
2) Descrizione prodotto e destinazione d’uso
1
Motoriduttore tipo RB600 RB600P RB1000 RB1000P
Tipo di finecorsa elettromeccanico di prossimità induttivo elettromeccanico di prossimità induttivo
Lunghezza massima anta 8m 12m
Peso massimo anta 600Kg 1000Kg
Coppia massima allo spunto 18Nm 27Nm
(corrispondenti a forza) (600N) (900N)
Motore e trasformatore Motore 24Vcc Ø 77mm Motore 24Vcc Ø 115mm
Trasformatore a colonna EI Trasformatore toroidale
Tabella 1: comparazione caratteristiche essenziali motoriduttore ROBUS
2.1) Limiti d’impiego
I dati relativi alle prestazioni dei prodotti della linea ROBUS sono
riportati nel capitolo “8 Caratteristiche tecniche” e sono gli unici valo-
ri che consentono la corretta valutazione dell'idoneità all'uso.
Le caratteristiche strutturali di ROBUS li rendono adatti all'uso su
ante scorrevoli, secondo i limiti riportati nelle tabelle 2, 3 e 4.
La reale idoneità di ROBUS ad automatizzare un determinato can-
cello scorrevole dipende dagli attriti e da altri fenomeni, anche occa-
sionali, come la presenza di ghiaccio che potrebbe ostacolare il
movimento dell'anta.
Per una verifica reale è assolutamente indispensabile misurare la for-
za necessaria per muovere l'anta in tutta la sua corsa e controllare
che questa non superi la metà della “coppia nominale” riportata nel
capitolo “8 Caratteristiche tecniche” (è consigliato un margine del
50% perché le condizioni climatiche avverse possono far aumentare
gli attriti); inoltre per stabilire il numero di cicli/ora; i cicli consecutivi e
la velocità massima consentita occorre considerare quanto riportato
nelle tabelle 2 e 3.
RB600, RB600P RB1000, RB1000P
Lunghezza anta (m) cicli/ora massimi cicli consecutivi massimi cicli/ora massimi cicli consecutivi massimi
Fino a 4 40 20 50 25
4 ÷ 6 25 13 33 16
6 ÷ 8 20 10 25 12
8 ÷ 10 --- --- 20 10
10 ÷ 12 --- --- 16 8
Tabella 2: limiti in relazione alla lunghezza dell'anta
330mm 210mm
303mm
92mm

31
I
La lunghezza dell'anta permette di determinare il numero massimo di cicli per ora ed i cicli consecutivi mentre il peso permette di determi-
nare la percentuale di riduzione dei cicli e la velocità massima consentita; ad esempio per ROBUS 1000, se l'anta è lunga 5m sarebbero pos-
sibili 33 cicli/ora e 16 cicli consecutivi ma se l'anta pesa 700Kg occorre ridurli al 50%, il risultato è quindi circa 16 cicli/ora e 8 cicli conse-
cutivi mentre la velocità massima consentita è V4: veloce. Per evitare surriscaldamenti la centrale prevede un limitatore di manovre che si
basa sullo sforzo del motore e la durata dei cicli, intervenendo quando viene superato il limite massimo. Il limitatore delle manovre misura
anche la temperatura ambientale riducendo ulteriormente le manovre in caso di temperatura particolarmente alta.
Nel capitolo “8 Caratteristiche tecniche” è riportata la stima di “durabilità” cioè di vita economica media del prodotto. Il valore è fortemente
influenzato dall'indice di gravosità delle manovre, cioè dalla somma di tutti i fattori che concorrono all'usura. Per effettuare la stima occorre
sommare tutti gli indici di gravosità della tabella 4, poi con il risultato totale verificare nel grafico la durabilità stimata.
Ad esempio, ROBUS 1000 su un cancello di 650Kg, lungo 5m, dotato di fotocellule e senza altri elementi di affaticamento, ottiene un indi-
ce di gravosità pari al 50% (30+10+10). Dal grafico la durabilità stimata è 80.000 cicli.
RB600, RB600P RB1000, RB1000P
Peso dell'anta (kg) Percentuale cicli Velocità massima Percentuale cicli Velocità massima
consentita consentita
Fino a 200 100% V6 = Velocissima 100% V6 = Velocissima
200 ÷ 400 80 V5 = Molto veloce 90 V5 = Molto veloce
400 ÷ 500 60 V4 = Veloce 75 V4 = Veloce
500 ÷ 600 50 V3 = Media 60 V4 = Veloce
600 ÷ 800 --- --- 50 V3 = Media
800 ÷ 900 --- --- 45 V3 = Media
900 ÷ 1000 --- --- 40 V3 = Media
Tabella 3: limiti in relazione al peso dell'anta
Indice di gravosità % Robus Durabilità in cicli
600 1000
Peso dell'anta Kg
Fino a 200 10 5
200 ÷ 400 30 10
400 ÷ 600 50 20
600 ÷ 700 --- 30
700 ÷ 800 --- 40
800 ÷ 900 --- 50
900 ÷ 1000 --- 60
Lunghezza dell'anta metri
Fino a 4 10 5
4 ÷ 6 20 10
6 ÷ 8 35 20
8 ÷ 10 --- 35
10 ÷ 12 --- 50
Altri elementi di affaticamento
(da considerare se la probabilità che
accadano è superiore al 10%)
Temperatura ambientale superiore a 40°C
o inferiore a 0°C o umidità superiore all'80%
10 10
Presenza di polvere o sabbia 15 15
Presenza di salsedine 20 20
Interruzione manovra da Foto 15 10
Interruzione manovra da Alt 25 20
Velocità superiore a “L4 veloce” 20 15
Spunto attivo 25 20
Totale indice di gravosità %:
Nota: se l'indice di gravosità supera il 100% significa che le condizioni sono oltre il limite di accettabilità; si consiglia l'uso di un modello di taglia supe-
riore.
Tabella 4: stima della durabilità in relazione all'indice di gravosità della manovra
Indice di gravosità %
Durabilità in cicli

32
2.2) Impianto tipico
In figura 2 è riportato l'impianto tipico di un cancello scorrevole automatizzato con ROBUS.
2
1 Selettore a chiave
2 Fotocellule su colonnina
3 Fotocellule
4 Bordo primario fisso (opzionale)
5 Bordo primario mobile
6 Staffa di finecorsa “Aperto”
7 Cremagliera
8 Bordo secondario fisso (opzionale)
9 Lampeggiante con antenna incorporata
10 ROBUS
11 Staffa di finecorsa “Chiuso”
12 Bordo secondario mobile (opzionale)
13 Radio trasmettitore
2.3) Elenco cavi
Nell'impianto tipico di figura 2 sono indicati anche i cavi necessari per i collegamenti dei vari dispositivi; in tabella 5 sono indicate le caratte-
ristiche dei cavi.
I cavi utilizzati devono essere adatti al tipo di installazione; ad esempio si consiglia un cavo tipo H03VV-F per posa in
ambienti interni oppure H07RN-F se posato all'esterno.
!
Nota 1: se il cavo di alimentazione è più lungo di 30m occorre un cavo con sezione maggiore, ad esempio 3x2,5mm
2
ed è necessaria una
messa a terra di sicurezza in prossimità dell'automazione.
Nota 2: se il cavo “BLUEBUS” è più lungo di 30m, fino ad un massimo di 50m, occorre un cavo 2x1mm
2
.
Nota 3: i due cavi 2x0,5mm
2
possono essere sostituiti da un solo cavo 4x0,5mm
2
.
Nota 4: se è presente più di un bordo vedere il paragrafo “7.3.2 Ingresso STOP” per il tipo di collegamento consigliato
Nota 5: per il collegamento dei bordi mobili su ante scorrevoli occorre utilizzare opportuni dispositivi che permettono la connessione anche
con l'anta in movimento.
Collegamento Tipo cavo Lunghezza massima consentita
A: Linea elettrica di alimentazione N°1 cavo 3x1,5mm
2
30m (nota 1)
B: Lampeggiante con antenna N°1 cavo 2x0,5mm
2
20m
N°1 cavo schermato tipo RG58 20m (consigliato minore di 5m)
C: Fotocellule N°1 cavo 2x0,5mm
2
30m (nota 2)
D: Selettore a chiave N°2 cavi 2x0,5mm
2
(nota 3) 50m
E: Bordi fissi N°1 cavo 2x0,5mm
2
(nota 4) 30m
F: Bordi mobili N°1 cavo 2x0,5mm
2
(nota 4) 30m (nota 5)
Tabella 5: elenco cavi
2
43 38
10
2
6
11
7
9
13
1251
EC F
D
C
F
A
B

33
I
3.2) Fissaggio del motoriduttore
Se la superficie di appoggio è già esistente il fissaggio del motori-
duttore dovrà avvenire direttamente sulla superficie utilizzando ade-
guati mezzi ad esempio attraverso tasselli ad espansione. Altrimen-
ti, per fissare il motoriduttore:
1. Eseguire uno scavo di fondazione di adeguate dimensioni usan-
do come riferimento al quote indicate in figura 3.
2. Predisporre uno o più tubi per il passaggio dei cavi elettrici come
in figura 4.
3. Assemblare le due zanche sulla piastra di fondazione ponendo un
dado sotto ed uno sopra la piastra; il dado sotto la piastra va
avvitato come in figura 5 in modo che la parte filettata sporga cir-
ca 25÷35 mm sopra la piastra.
4. Effettuare la colata di calcestruzzo e, prima che inizi la presa, por-
re la piastra di fondazione alle quote indicate in figura 3; verifica-
re che sia parallela all'anta e perfettamente in bolla, figura 6.
Attendere la completa presa del calcestruzzo.
5. Togliere i 2 dadi superiori alla piastra quindi appoggiarvi il motori-
duttore; verificare che sia perfettamente parallelo all'anta poi avvi-
tare leggermente i 2 dadi e rondelle in dotazione come in figura 7.
L'installazione di ROBUS deve essere effettuata da personale qualificato, nel rispetto di leggi, norme e regolamenti e di
quanto riportato nelle presenti istruzioni.
!
3) Installazione
3.1) Verifiche preliminari
Prima di procedere con l'installazione di ROBUS è necessario ese-
guire questi controlli:
• Verificare che tutto il materiale da utilizzare sia in ottimo stato, adat-
to all'uso e conforme alle norme.
• Verificare che la struttura del cancello sia adatta ad essere auto-
matizzata.
• Verificare che peso e dimensioni dell'anta rientrino nei limiti di
impiego riportati nel capitolo “2.1 Limiti d'impiego”
• Verificare, confrontando con i valori riportati nel capitolo “8 Carat-
teristiche tecniche”, che la forza necessaria per mettere in movi-
mento l'anta sia inferiore a metà della “Coppia massima” e che la
forza necessaria per mantenere in movimento l'anta sia inferiore a
metà della “Coppia nominale”; viene consigliato un margine del
50% sulle forze perché le condizioni climatiche avverse possono
far aumentare gli attriti.
• Verificare che in tutta la corsa del cancello, sia in chiusura che in
apertura, non ci siano punti con maggiore attrito.
• Verificare che non vi sia pericolo di deragliamento dell'anta e che
non ci siano rischi di uscita dalle guide
• Verificare la robustezza degli arresti meccanici di oltre corsa con-
trollando che non vi siano deformazioni anche se l'anta dovesse
sbattere con forza sull'arresto.
• Verificare che l'anta sia in equilibrio cioè non deve muoversi se
lasciata ferma in una qualsiasi posizione.
• Verificare che la zona di fissaggio del motoriduttore non sia sog-
getta ad allagamenti; eventualmente prevedere il montaggio del
motoriduttore adeguatamente sollevato da terra.
• Verificare che la zona di fissaggio del motoriduttore permetta lo
sblocco ed una manovra manuale facile e sicura.
• Verificare che i punti di fissaggio dei vari dispositivi siano in zone
protette da urti e le superfici siano sufficientemente solide.
• Evitare che le parti dell'automatismo possano venir immerse in
acqua o in altre sostanze liquide.
• Non porre ROBUS vicino a fiamme o fonti di calore; in atmosfere
potenzialmente esplosive, particolarmente acide o saline; questo
può danneggiare ROBUS ed essere causa di malfunzionamenti o
situazioni di pericolo.
• Nel caso sia presente un porta di passaggio interna all'anta oppu-
re una porta sull'area di movimento dell'anta, occorre assicurarsi
che non intralci la normale corsa ed eventualmente provvedere
con un opportuno sistema di interblocco
• Collegare la centrale ad una linea di alimentazione elettrica dotata
di messa a terra di sicurezza.
• La linea di alimentazione elettrica deve essere protetta da un ade-
guato dispositivo magnetotermico e differenziale.
• Sulla linea di alimentazione dalla rete elettrica è necessario inserire
un dispositivo di sconnessione dell'alimentazione (con categoria di
sovratensione III cioè distanza fa i contatti di almeno 3,5mm) oppu-
re altro sistema equivalente ad esempio una presa e relativa spina.
Se il dispositivo di sconnessione dell'alimentazione non è in pros-
simità dell'automazione deve disporre di un sistema di blocco con-
tro la connessione non intenzionale o non autorizzata.
3
4
5
6
25÷35
7
192
330 0÷50
0÷50 330
192
0÷10
0÷10

34
3.3) Fissaggio delle staffe di finecorsa nelle versioni con finecorsa di prossimità induttivo
Per evitare che il peso dell’anta possa gravare sul motoridut-
tore è importante che tra cremagliera e pignone ci sia un gioco
di 1÷2 mm come in figura 10.
8.
Far scorrere l’anta ed utilizzare sempre il pignone come riferimento
per fissare gli altri elementi della cremagliera.
9.
Tagliare l’ultimo tratto di cremagliera per la parte eccedente.
10.
Provare a muovere l’anta varie volte in apertura e chiusura e verifi-
care che la cremagliera scorra allineata sul pignone con un disalli-
neamento massimo di 5 mm e che per tutta la lunghezza sia stato
rispettato il gioco 1÷2 mm tra pignone e cremagliera.
11.
Serrare energicamente i dadi di fissaggio del motoriduttore assicu-
randosi così che sia ben saldo a terra; coprire i dadi di fissaggio con
gli appositi tappi come in figura 11.
12.
Fissare le staffe di finecorsa come descritto di seguito (per le versioni
RB600P e RB1000P fissare le staffe come descritto nel paragrafo
“3.3 Fissaggio delle staffe di finecorsa nelle versioni con finecorsa di
prossimità induttivo”):
• Portare manualmente l’anta in posizione di apertura lasciando
almeno 2 – 3cm dall’arresto meccanico.
• Far scorrere la staffa sulla cremagliera nel senso dell’apertura fino
a far intervenire il finecorsa. Quindi far avanzare la staffa di alme-
no 2cm e poi bloccare con i relativi grani la staffa alla cremagliera,
come in figura 12.
• Eseguire la stessa operazione per il finecorsa di chiusura.
13. Bloccare il motoriduttore come indicato nel paragrafo “Sblocco e
movimento manuale” sul capitolo “Istruzioni ed avvertenze destina-
te all’utilizzatore
!
8 9 10
11 12
Se la cremagliera è già presente, una volta fissato il motoriduttore,
agire su grani di regolazione come in figura 8 per porre il pignone di
ROBUS alla giusta altezza lasciando 1÷2 mm di gioco dalla crema-
gliera. Altrimenti per fissare la cremagliera occorre:
6. Sbloccare il motoriduttore come indicato nel paragrafo “Sblocco
e movimento manuale” sul capitolo “Istruzioni ed avvertenze
destinate all'utilizzatore del motoriduttore ROBUS”.
7. Aprire completamente l'anta, appoggiare sul pignone il primo
tratto di cremagliera e verificare che l'inizio della cremagliera cor-
risponda all'inizio dell'anta come in figura 9. Verificare che tra
pignone e cremagliera vi sia un gioco di 1÷2 mm, quindi fissare
con mezzi adeguati la cremagliera sull'anta.
1÷2
Per le versioni RB600P e RB1000P che utilizzano il finecorsa di pros-
simità induttivo, occorre fissare le staffe finecorsa come descritto di
seguito.
1. Portare manualmente l’anta in posizione di apertura lasciando
almeno 2 - 3cm dall’arresto meccanico.
2. Far scorrere la staffa sulla cremagliera nel senso dell’apertura fino
a quando il led corrispondente si spegne, come in figura 13.
Quindi far avanzare la staffa di almeno 2cm e poi bloccare con i
relativi grani la staffa alla cremagliera.
3. Portare manualmente l’anta in posizione di chiusura lasciando
almeno 2 - 3cm dall’arresto meccanico.
4. Far scorrere la staffa sulla cremagliera nel senso della chiusura
fino a quando il led corrispondente si spegne. Quindi far avanza-
re la staffa di almeno 2cm e poi bloccare con i relativi grani la staf-
fa alla cremagliera.
Nel finecorsa di prossimità induttivo la distanza ottimale
della staffa è compresa tra 3 e 8mm, come indicato in figura
14.
!
13
14
3÷8

35
I
3.5) Collegamenti elettrici
Tutti i collegamenti elettrici devono essere eseguiti in
assenza di tensione all’impianto e con l’eventuale batteria
tampone scollegata.
1. Per rimuovere il coperchio di protezione ed accedere alla centra-
le elettronica di controllo di ROBUS occorre togliere la vite a lato
e sfilare il coperchio tirandolo verso l’alto.
2. Rimuovere la membrana di gomma che chiude il foro per il pas-
saggio dei cavi ed infilare tutti i cavi di collegamento verso i vari
dispositivi, lasciandoli 20÷30 cm più lunghi del necessario. Vede-
re tabella 5 per il tipo di cavi e figura 2 per i collegamenti.
3. Attraverso una fascetta raccogliere ed unire tutti i cavi che entra-
no nel motoriduttore, porre la fascetta poco sotto il foro d’entrata
cavi. Sulla membrana di gomma ritagliare un foro un po’ più stret-
to del diametro dei cavi raccolti ed infilare la membrana lungo i
cavi fino alla fascetta; quindi reinserire la membrana nella sede del
foro per il passaggio dei cavi. Porre una seconda fascetta per
raccogliere i cavi appena sopra la membrana.
4. Collegare il cavo di alimentazione sull’apposito morsetto come
indicato in figura 15 quindi con una fascetta bloccare il cavo al pri-
mo anello ferma cavi.
5. Eseguire i collegamenti degli altri cavi secondo lo schema di figu-
ra 17. Per maggiore comodità i morsetti sono estraibili.
6. Terminati i collegamenti bloccare con delle fascette i cavi raccolti
al secondo anello ferma cavi, la parte eccedente del cavo d’an-
tenna va bloccata agli altri cavi con un’altra fascetta come indica-
to in figura 16.
!
3.4) Installazione dei vari dispositivi
Effettuare l’installazione degli altri dispositivi previsti seguendo le rispettive istruzioni. Verificare nel paragrafo “3.6 Descrizione dei collegamenti
elettrici” ed in figura 2 i dispositivi che possono essere collegati a ROBUS.
15
17
16
Per il collegamento di 2 motori su ante contrapposte vedere il paragrafo “7.3.5 ROBUS in modalità Slave”.
LUCYB
S.C.A.
MOFB MOSE
OPEN CLOSE

36
3.6) Descrizione dei collegamenti elettrici
In questo paragrafo c’è una breve descrizione dei collegamenti elet-
trici; ulteriori informazioni sono presenti nel paragrafo “7.3 Aggiunta
o rimozione dispositivi”.
FLASH: uscita per uno o due lampeggianti tipo “LUCYB” o simili con
la sola lampada 12V massimo 21W.
S.C.A.: uscita “Spia Cancello Aperto”; è possibile collegare una lam-
pada di segnalazione 24V massimo 4W. Può essere programmata
anche per altre funzioni; vedere paragrafo “7.2.3 Funzioni secondo
livello”.
BLUEBUS: su questo morsetto si possono collegare i dispositivi
compatibili; tutti vengono collegati in parallelo con soli due condut-
tori sui quali transita sia l’alimentazione elettrica che i segnali di
comunicazione. Altre informazioni su BlueBUS sono presenti nel
paragrafo “7.3.1 BlueBUS”.
STOP: ingresso per dispositivi che bloccano o eventualmente arre-
stano la manovra in corso; con opportuni accorgimenti sull’ ingres-
so è possibile collegare contatti tipo “Normalmente Chiuso”, tipo
“Normalmente Aperto” oppure dispositivi a resistenza costante. Altre
informazioni su STOP sono presenti nel paragrafo “7.3.2 Ingresso
STOP”.
P. P.: ingresso per dispositivi che comandano il movimento in moda-
lità Passo-Passo; è possibile collegare contatti di tipo “Normalmen-
te Aperto”.
OPEN: ingresso per dispositivi che comandano il movimento di sola
apertura; è possibile collegare contatti di tipo “Normalmente Aperto”.
CLOSE: ingresso per dispositivi che comandano il movimento di
sola chiusura; è possibile collegare contatti di tipo “Normalmente
Aperto”.
ANTENNA: ingresso di collegamento dell’antenna per ricevitore
radio (l’antenna è incorporata su LUCY B).
Prima di iniziare la fase di verifica ed avviamento dell’automazione è consigliabile porre l’anta a metà corsa circa in modo che sia libera di
muovere sia in apertura che in chiusura.
4) Verifiche finali ed avviamento
4.1) Selezione della direzione
A seconda della posizione del motoriduttore rispetto all’anta è
necessario scegliere la direzione della manovra di apertura; se per
l’apertura l’anta deve muovere verso sinistra occorre spostare il
selettore verso sinistra come in figura 18, se per l’apertura l’anta
deve muovere a destra occorre spostare il selettore a destra come
in figura 19.
18
19
4.2) Allacciamento dell’alimentazione
L’allacciamento dell’alimentazione a ROBUS deve esse-
re eseguito da personale esperto, qualificato, in possesso
dei requisiti richiesti e nel pieno rispetto di leggi, norme e
regolamenti.
Non appena viene fornita tensione a ROBUS è consigliabile fare
alcune semplici verifiche:
1. Verificare che il led BlueBUS lampeggi regolarmente alla frequen-
za di un lampeggio al secondo.
2. Verificare che lampeggino anche i led sulle fotocellule (sia su TX
che su RX); non è significativo il tipo di lampeggio, dipende da altri
fattori.
3. Verificare che il lampeggiante collegato all’uscita FLASH e la lam-
pada spia collegata sull’uscita S.C.A. siano spenti
Se tutto questo non avviene occorre spegnere immediatamente l’a-
limentazione alla centrale e controllare con maggiore attenzione i col-
legamenti elettrici.
Altre informazioni utili per la ricerca e la diagnosi dei guasti sono pre-
senti nel capitolo “7.6 Risoluzione dei problemi”.
!
4.3) Apprendimento dei dispositivi
Dopo l'allacciamento dell'alimentazione occorre far riconoscere alla centrale i dispositivi collegati sugli ingressi BlueBUS e STOP. Prima di
questa fase i led L1 ed L2 lampeggiano per indicare che occorre eseguire l'apprendimento dei dispositivi.
La fase di apprendimento dispositivi collegati può essere rifatta in qualsiasi momento anche dopo l'installazione per esempio se venisse
aggiunto un dispositivo; per effettuare il nuovo apprendimento vedere paragrafo “7.3.6 Apprendimento altri dispositivi”.
1. Premere e tenere premuti i tasti [▲] e [Set]
2. Rilasciare i tasti quando i led L1 e L2 iniziano a lampeggiare molto velocemente (dopo circa 3s)
3. Attendere alcuni secondi che la centrale finisca l'apprendimento dei dispositivi
4. Al termine dell'apprendimento il led STOP deve rimanere acceso, i led L1 e L2 si spegneranno
(eventualmente inizieranno a lampeggiare i led L3 e L4)
20

37
I
4.4) Apprendimento lunghezza dell'anta
Dopo l'apprendimento dei dispositivi inizieranno a lampeggiare i led L3 e L4; ciò significa che è necessario far riconoscere alla centrale la lun-
ghezza dell'anta (distanza dal finecorsa di chiusura al finecorsa di apertura); questa misura è necessaria per il calcolo dei punti di rallenta-
mento ed il punto di apertura parziale.
Se tutto questo non avviene occorre spegnere immediatamente l'alimentazione alla centrale e controllare con maggiore attenzione i collega-
menti elettrici. Altre informazioni utili sono presenti nel capitolo “7.6 Risoluzione dei problemi”.
1. Premere e tenere premuti i tasti [▼] e [Set]
2. Rilasciare i tasti quando inizia la manovra (dopo circa 3s)
3. Verificare che la manovra in corso sia una apertura altrimenti premere il tasto [Stop] e controllare con mag-
giore attenzione il paragrafo “4.1 Selezione della direzione”; poi ripetere dal punto 1.
4. Attendere che la centrale completi la manovra di apertura fino al raggiungimento del finecorsa di apertura;
subito dopo inizia la manovra di chiusura.
5. Attendere che la centrale completi la manovra di chiusura.
4.5) Verifica del movimento del cancello
Dopo l'apprendimento della lunghezza dell'anta è consigliabile effet-
tuare alcune manovre per verificare il corretto movimento del can-
cello.
1. Premere il tasto [Open] per comandare una manovra di “Apre”;
verificare che l'apertura del cancello avvenga regolarmente senza
variazioni di velocità; solo quando l'anta è tra 70 e 50cm dal fine-
corsa di apertura dovrà rallentare e fermarsi, per intervento del
finecorsa, a 2÷3cm dall'arresto meccanico di apertura.
2. Premere il tasto [Close] per comandare una manovra di “Chiu-
de”; verificare che la chiusura del cancello avvenga regolarmente
senza variazioni di velocità; solo quando l'anta è tra 70 e 50cm dal
finecorsa di chiusura dovrà rallentare e fermarsi, per intervento del
finecorsa, a 2÷3cm dall'arresto meccanico di chiusura.
3. Durante le manovra verificare che il lampeggiante effettui i lam-
peggi con periodi di 0,5s acceso e 0,5s spento. Se presente,
controllare anche i lampeggi della spia collegata al morsetto
S.C.A.: lampeggio lento in apertura, veloce in chiusura.
4. Effettuare varie manovre di apertura e chiusura con lo scopo di
evidenziare eventuali difetti di montaggio e regolazione o altre
anomalie come ad esempio punti con maggior attrito.
5. Verificare che il fissaggio del motoriduttore ROBUS, della crema-
gliera e delle staffe di finecorsa siano solidi, stabili ed adeguata-
mente resistenti anche durante le brusche accelerazioni o decele-
razioni del movimento del cancello.
4.6) Funzioni preimpostate
La centrale di controllo di ROBUS dispone di alcune funzioni pro-
grammabili; di fabbrica queste funzioni vengono regolate in una con-
figurazione che dovrebbe soddisfare la maggior parte delle automa-
zioni.
Le funzioni possono essere cambiate in qualsiasi momento attraver-
so una opportuna procedura di programmazione, a questo scopo
vedere paragrafo “7.2 Programmazioni”.
21
4.7) Ricevitore radio
Per il comando a distanza di ROBUS, sulla centrale di controllo è previsto l'innesto SM per ricevitori radio tipo SMXI o SMXIS opzionali.
Per ulteriori informazioni, consultare il manuale di istruzioni del ricevitore radio. Per inserire il ricevitore radio eseguire l'operazione indicata in
figura 22. In tabella 6 è descritta l'associazione tra l'uscita del ricevitore radio ed il comando che ROBUS eseguirà:
22
Uscita N°1 Comando “P.P.” (Passo-Passo)
Uscita N°2 Comando “Apertura parziale”
Uscita N°3 Comando “Apre”
Uscita N°4 Comando “Chiude”
Tabella 6: comandi con trasmettitore
Questa è la fase più importante nella realizzazione dell'automazione
al fine di garantire la massima sicurezza. Il collaudo può essere usa-
to anche come verifica periodica dei dispositivi che compongono
l'automatismo.
Il collaudo dell'intero impianto deve essere eseguito da
personale esperto e qualificato che deve farsi carico del-
le prove richieste, in funzione del rischio presente e di
verificare il rispetto di quanto previsto da leggi, normative
e regolamenti, ed in particolare tutti i requisiti della nor-
ma EN12445 che stabilisce i metodi di prova per la verifi-
ca degli automatismi per cancelli.
!
5) Collaudo e messa in servizio

38
5.1) Collaudo
Ogni singolo componente dell'automatismo, ad esempio bordi sen-
sibili, fotocellule, arresto di emergenza, ecc. richiede una specifica
fase di collaudo; per questi dispositivi si dovranno eseguire le proce-
dure riportate nei rispettivi manuali istruzioni. Per il collaudo di
ROBUS eseguire la seguente sequenza di operazioni:
1. Verificare che sia stato rispettato rigorosamente tutto quanto pre-
visto nel presente manuale ed in particolare nel capitolo “1 Avver-
tenze”;
2. Sbloccare il motoriduttore come indicato nel paragrafo “Sblocco
e movimento manuale” sul capitolo “Istruzioni ed avvertenze
destinate all'utilizzatore del motoriduttore ROBUS”
3. Verificare che sia possibile muovere manualmente l'anta in aper-
tura e in chiusura con una forza non superiore a 390N (circa 40kg)
4. Bloccare il motoriduttore.
5. Utilizzando i dispositivi di comando o arresto previsti (selettore a
chiave, pulsanti di comando o trasmettitori radio), effettuare delle
prove di apertura, chiusura ed arresto del cancello e verificare che
il comportamento corrisponda a quanto previsto.
6. Verificare uno ad uno il corretto funzionamento di tutti i dispositivi
di sicurezza presenti nell'impianto (fotocellule, bordi sensibili, arre-
sto di emergenza, ecc.); e verificare che il comportamento del
cancello corrisponda a quanto previsto. Ogni volta che un dispo-
sitivo interviene, sulla centrale il led “BlueBUS” deve eseguire 2
lampeggi più veloci a conferma che la centrale riconosce l'even-
to.
7. Se le situazioni pericolose provocate dal movimento dell'anta
sono state salvaguardate mediante la limitazione della forza d'im-
patto si deve eseguire la misura della forza secondo quanto pre-
visto dalla norma EN 12445. Se la regolazione della “Velocità” ed
il controllo della “Forza Motore” vengono usati come ausilio al
sistema per la riduzione della forza d'impatto, provare e trovare le
regolazioni che offrono i migliori risultati.
5.2) Messa in servizio
La messa in servizio può avvenire solo dopo aver eseguito con esi-
to positivo tutte le fasi di collaudo di ROBUS e degli altri dispositivi
presenti. E' vietata la messa in servizio parziale o in situazioni “prov-
visorie”.
1. Realizzare e conservare per almeno 10 anni il fascicolo tecnico del-
l'automazione che dovrà comprendere almeno: disegno comples-
sivo dell'automazione, schema dei collegamenti elettrici, analisi dei
rischi e relative soluzioni adottate, dichiarazione di conformità del
fabbricante di tutti i dispositivi utilizzati (per ROBUS utilizzare la
Dichiarazione CE di conformità allegata); copia del manuale di istru-
zioni per l'uso e del piano di manutenzione dell'automazione.
2. Apporre sul cancello una targhetta contenente almeno i seguenti
dati: tipo di automazione, nome e indirizzo del costruttore
(responsabile della “messa in servizio”), numero di matricola, anno
di costruzione e marchio “CE”.
3. Fissare in maniera permanente in prossimità del cancello un'eti-
chetta o una targa con indicate le operazioni per lo sblocco e la
manovra manuale.
4. Realizzare e consegnare al proprietario la dichiarazione di confor-
mità dell'automazione.
5. Realizzare e consegnare al proprietario il manuale di “Istruzioni ed
avvertenze per l'uso dell'automazione”.
6. Realizzare e consegnare al proprietario il piano di manutenzione
dell'automazione (che deve raccogliere tutte le prescrizioni sulla
manutenzione dei singoli dispositivi installati).
7. Prima di mettere in servizio l'automatismo informare adeguata-
mente ed in forma scritta il proprietario (ad esempio sul manuale
di istruzioni ed avvertenze per l'uso dell'automazione) sui pericoli
ed i rischi ancora presenti.
In questo capitolo sono riportate le informazioni per la realizzazione del piano di manutenzione e lo smaltimento di ROBUS.
6) Manutenzione e smaltimento
6.1) Manutenzione
Per mantenere costante il livello di sicurezza e per garantire la mas-
sima durata dell'intera automazione è necessaria una manutenzione
regolare; a tale scopo ROBUS dispone di un contatore di manovre e
un sistema di segnalazione di manutenzione richiesta; vedere para-
grafo “7.4.3 Avviso di Manutenzione”.
La manutenzione deve essere effettuata nel pieno
rispetto delle prescrizioni sulla sicurezza del presente
manuale e secondo quanto previsto dalle leggi e normati-
ve vigenti.
Per gli altri dispositivi diversi da ROBUS seguire quanto previsto nei
rispettivi piani manutenzione.
1. Per ROBUS è necessaria una manutenzione programmata al
massimo entro 6 mesi o al massimo dopo 20.000 manovre dalla
precedente manutenzione.
2. Scollegare qualsiasi sorgente di alimentazione elettrica, compre-
se le eventuali batterie tampone.
3. Verificare lo stato di deterioramento di tutti i materiali che com-
pongono l'automazione con particolare attenzione a fenomeni di
erosione o di ossidazione delle parti strutturali; sostituire le parti
che non forniscono sufficienti garanzie .
4. Verificare lo stato di usura delle parti in movimento: pignone, cre-
magliera e tutte le parti dell'anta, sostituire la parti usurate.
5. Ricollegare le sorgenti di alimentazione elettrica ed eseguire tutte
le prove e le verifiche previste nel paragrafo “5.1 Collaudo”.
!
6.2) Smaltimento
ROBUS è costituito da diverse tipologie di materiali, alcuni di questi
possono essere riciclati: acciaio, alluminio, plastica, cavi elettrici; altri
materiali dovranno essere smaltiti: batterie e schede elettroniche.
Alcuni componenti elettronici e le batterie potrebbero
contenere sostanze inquinanti, non disperderli nell'am-
biente. Informatevi sui sistemi di riciclaggio o smaltimen-
to attenendovi alle norme in vigore a livello locale.
1. Scollegare l'alimentazione elettrica dall'automatismo e l'eventua-
le batteria tampone.
2. Smontare tutti i dispositivi ed accessori, seguendo il procedimen-
to inverso a quello descritto nel capitolo “3 Installazione”.
3. Separare per quanto possibile le parti che possono o devono esse-
re riciclate o smaltite in modo diverso, ad esempio le parti metalli-
che da quelle plastiche, le schede elettroniche, le batterie ecc.
4. Smistare ed affidare i vari materiali così separati ai centri abilitati
al recupero ed allo smaltimento previsti a livello locale.
!

39
I
In questo capitolo verranno trattate le possibilità di programmazione, personalizzazione, diagnostica e ricerca guasti su ROBUS.
7) Approfondimenti
Open Il tasto “OPEN” permette di comandare l'apertura del cancello oppure di
▲ spostare verso l'alto il punto di programmazione
Stop Il tasto “STOP” permette di fermare la manovra se premuto per più di
Set 5 secondi permette di entrare in programmazione.
Close Il tasto “CLOSE “permette di comandare la chiusura del cancello oppure
▼ di spostare verso il basso il punto di programmazione
7.1) Tasti di programmazione
Sulla centrale di controllo di ROBUS sono presenti 3 tasti che pos-
sono essere usati sia per il comando della centrale durante le prove
sia per le programmazioni:
23
7.2) Programmazioni
Sulla centrale di controllo di ROBUS sono disponibili alcune funzioni
programmabili; la regolazione delle funzioni avviene attraverso 3 tasti
presenti sulla centrale [▲] [Set] [▼] e vengono visualizzate attra-
verso 8 led: L1….L8.
Le funzioni programmabili disponibili su ROBUS sono disposte su 2
livelli:
Primo livello: funzioni regolabili in modo ON-OFF (attivo oppure
non attivo); in questo caso ogni led L1….L8 indica una funzione, se
acceso la funzione è attiva, se spento la funzione non è attiva; vede-
re tabella 7.
Secondo livello: parametri regolabili su una scala di valori (valori
da 1 a 8); in questo caso ogni led L1….L8 indica il valore regolato
tra i 8 possibili; vedere tabella 9.
Led Funzione Descrizione
L1 Chiusura Automatica Questa funzione permette una chiusura automatica del cancello dopo il tempo pausa programmato, di
fabbrica il Tempo Pausa è posto a 30 secondi ma può essere modificato a 5, 15, 30, 45, 60, 80, 120 e
180 secondi. Se la funzione non è attivata, il funzionamento è “semiautomatico”.
L2 Richiudi Dopo Foto Questa funzione permette di tenere il cancello aperto solo per il tempo necessario al transito, infatti
l'intervento di "Foto" provoca sempre una richiusura automatica con un tempo pausa di 5s
(indipendentemente dal valore programmato)
Il comportamento cambia a seconda che sia attiva o meno la funzione di "Chiusura Automatica".
Con "Chiusura Automatica" non attiva: Il cancello raggiunge sempre la posizione di totale apertura
(anche se il disimpegno di Foto avviene prima). Al disimpegno di Foto si provoca la richiusura automatica
con una pausa di 5s.
Con "Chiusura Automatica" attiva: la manovra di apertura si arresta subito dopo il disimpegno delle
fotocellule e si provoca la richiusura automatica con una pausa di 5s.
La funzione di "Richiudi Dopo Foto" viene sempre disabilitata nelle manovre interrotte con un comando di Stop.
Se la funzione "Richiudi Dopo Foto" non è attiva il tempo di pausa sarà quello programmato o non ci
sarà richiusura automatica se la funzione non è attiva.
L3 Chiude Sempre La funzione “Chiude Sempre” interviene, provocando una chiusura, quando al ritorno dell'alimentazione
viene rilevato il cancello aperto. Per questioni di sicurezza la manovra viene preceduta da 5s di
prelampeggio. Se la funzione non è attiva, al ritorno dell'alimentazione il cancello rimarrà fermo.
L4 Stand-By Questa funzione permette di ridurre al massimo i consumi, è utile in particolare nel funzionamento con
batteria tampone. Se questa funzione è attiva, dopo 1 minuto dal termine della manovra, la centrale
spegne l'uscita BlueBUS (e quindi i dispositivi) e tutti i led ad esclusione del led BlueBUS che lampeggerà
più lentamente. Quando la centrale riceve un comando ripristina il pieno funzionamento. Se la funzione
non è attiva non ci sarà riduzione dei consumi.
L5 Spunto Attivando questa funzione, viene disinserita l'accelerazione graduale ad ogni inizio manovra; permette di
avere la massima forza di spunto ed è utile dove ci sono elevati attriti statici, ad esempio in caso di neve
o ghiaccio che bloccano l'anta. Se lo spunto non è attivo la manovra inizia con una accelerazione graduale.
L6 Prelampeggio Con la funzione di prelampeggio viene aggiunta una pausa di 3s tra l'accensione del lampeggiante e
l'inizio della manovra per avvertire in anticipo della situazione di pericolo. Se il prelampeggio non è attivo
l'accensione del lampeggiante coincide con l'inizio manovra.
L7 “Chiude” diventa Attivando questa funzione tutti i comandi “chiude” (ingresso “CLOSE” o comando radio “chiude”) attivano
“Apre Parziale” una manovra di apertura parziale (vedere led L6 su tabella 9).
L8 Modo “Slave” (schiavo) Attivando questa funzione ROBUS diventa “Slave” (schiavo): è possibile, così, sincronizzare il
funzionamento di 2 motori su ante contrapposte nelle quali un motore funziona da Master e uno da
Slave; per maggiori dettagli vedere il paragrafo “ 7.3.5 ROBUS in modalità “Slave”.
Durante il funzionamento normale di ROBUS i led L1….L8 sono accesi o spenti in base allo stato della funzione che rappresentano, ad
esempio L1 è acceso se è attiva la “Chiusura automatica”.
Tabella 7: elenco funzioni programmabili: primo livello
7.2.1) Funzioni primo livello (funzioni ON-OFF)

40
Tempo
Pausa
Funzione P.P.
Velocità
Motore
Uscita
S.C.A.
Forza
motore
L1
L2
L3
L4
L5
L6
L7
L8
L1
L2
L3
L4
L5
L6
L7
L8
L1
L2
L3
L4
L5
L6
L7
L8
L1
L2
L3
L4
L5
L6
L7
L8
L1
L2
L3
L4
L5
L6
L7
L8
5 secondi
15 secondi
30 secondi
45 secondi
60 secondi
80 secondi
120 secondi
180 secondi
Apre - stop – chiude- stop
Apre - stop - chiude- apre
Apre - chiude- apre – chiude
Condominiale
Condominiale 2 (più di 2” fa stop)
Passo-Passo 2 (meno di 2” fa apre parziale)
Uomo presente
Apertura in “semiautomatico”, chiusura a
“uomo presente”
Molto lenta
Lenta
Media
Veloce
Molto veloce
Velocissima
Apre “veloce”; chiude “lento”
Apre “velocissima”, Chiude “veloce”
Funzione “Spia Cancello Aperto”
Attiva se anta chiusa
Attiva se anta aperta
Attiva con uscita radio N°2
Attiva con uscita radio N°3
Attiva con uscita radio N°4
Spia manutenzione
Elettroserratura
Cancello leggerissimo
Cancello molto leggero
Cancello leggero
Cancello medio
Cancello medio-pesante
Cancello pesante
Cancello molto pesante
Cancello pesantissimo
7.2.2) Programmazione primo livello (funzioni ON-OFF)
Di fabbrica le funzioni del primo livello sono poste tutte “OFF” ma si possono cambiare in qualsiasi momento come indicato in tabella 8. Fare
attenzione nell'eseguire la procedura perché c'è un tempo massimo di 10s tra la pressione di un tasto e l'altro, altrimenti la procedura fini-
sce automaticamente memorizzando le modifiche fatte fino a quel momento.
1. Premere e tener premuto il tasto [Set] per circa 3s
3s
2. Rilasciare il tasto [Set] quando il led L1 inizia a lampeggiare
L1
3. Premere i tasti [▲] o [▼] per spostare il led lampeggiante sul led che rappresenta la funzione
da modificare o
4. Premere il tasto [Set] per cambiare lo stato della funzione (lampeggio breve = OFF;
lampeggio lungo = ON)
5. Attendere 10s per uscire dalla programmazione per fine tempo massimo.
10s
Nota: i punti 3 e 4 possono essere ripetuti durante le stessa fase di programmazione per porre ON o OFF altre funzioni.
Tabella 8: per cambiare le funzioni ON-OFF Esempio
SET
SET
SET
7.2.3 Funzioni secondo livello (parametri regolabili)
Tabella 9: elenco funzioni programmabili: secondo livello
Led di entrata
Parametro Led (livello) Valore Descrizione
Regola il tempo di pausa cioè il tempo pri-
ma della richiusura automatica. Ha effetto
solo se la chiusura automatica è attiva.
Regola la sequenza di comandi associati
all’ingresso P.P oppure al 1° comando
radio.
Regola la velocità del motore durante la
corsa normale.
Regola la funzione associata all’uscita
S.C.A. (qualunque sia la funzione associata
l’uscita, quando attiva, fornisce una tensio-
ne di 24V –30 +50% con una potenza
massima di 4W)
Regola il sistema di controllo della forza del
motore per adeguarlo al peso del cancello.
Il sistema di controllo della forza misura
anche la temperatura ambientale aumen-
tando automaticamente la forza in caso di
temperature particolarmente basse.
L1
L2
L3
L4
L5

41
I
Nota: “ ” rappresenta la regolazione di fabbrica
Tutti i parametri possono essere regolati a piacere senza nessuna controindicazione; solo la regolazione della “Forza Motore” potrebbe richie-
dere una attenzione particolare:
• E’ sconsigliato utilizzare valori alti di forza per compensare il fatto che l’anta abbia dei punti di attrito anomali; una forza eccessiva può pre-
giudicare il funzionamento del sistema di sicurezza o danneggiare l’anta.
• Se il controllo della “Forza Motore” viene usato come ausilio al sistema per la riduzione della forza di impatto, dopo ogni regolazione ripe-
tere la misura della forza, come previsto dalla norma EN 12445.
• L’usura e le condizioni atmosferiche influiscono sul movimento del cancello, periodicamente e necessario ricontrollare la regolazione della
forza.
Apre Parziale
Avviso di
manutenzione
Elenco
anomalie
L1
L2
L3
L4
L5
L6
L7
L8
L1
L2
L3
L4
L5
L6
L7
L8
L1
L2
L3
L4
L5
L6
L7
L8
0,5 mt
1 mt
1,5 mt
2 mt
2,5 mt
3 mt
3,4 mt
4 mt
Automatico (in base alla gravosità delle
manovre)
1000
2000
4000
7000
10000
15000
20000
Esito 1
a
manovra (la più recente)
Esito 2
a
manovra
Esito 3
a
manovra
Esito 4
a
manovra
Esito 5
a
manovra
Esito 6
a
manovra
Esito 7
a
manovra
Esito 8
a
manovra
Led di entrata
Parametro Led (livello) Valore Descrizione
Regola la misura dell’apertura parziale. L’a-
pertura parziale si può comandare col 2°
comando radio oppure con “CHIUDE” se
c’è la funzione “Chiude” diventa “Apre Par-
ziale”
Regola il numero di manovre dopo il quale
segnalare la richiesta di manutenzione del-
l’automazione (vedere paragrafo “7.4.3
Avviso di Manutenzione”).
Permette di verificare il tipo di anomalia
intervenuta nelle ultime 8 manovre (vedere
paragrafo “7.6.1 Storico anomalie”).
L6
L7
L8
7.2.4) Programmazione secondo livello (parametri regolabili)
Di fabbrica i parametri regolabili sono posti come evidenziato in tabella 9 con: “ ” ma si possono cambiare in qualsiasi momento come
indicato in tabella N°10. Fare attenzione nell'eseguire la procedura perché c'è un tempo massimo di 10s tra la pressione di un tasto e l'al-
tro, altrimenti la procedura finisce automaticamente memorizzando le modifiche fatte fino a quel momento.
1. Premere e tener premuto il tasto [Set] per circa 3s
3s
2. Rilasciare il tasto [Set] quando il led L1 inizia a lampeggiare
L1
3. Premere i tasti [▲] o [▼] per spostare il led lampeggiante sul “led di entrata”
che rappresenta il parametro da modificare o
4. Premere e mantenere premuto il tasto [Set], il tasto [Set] va mantenuto premuto
durante tutti i passi 5 e 6
5. Attendere circa 3s dopodiché si accenderà il led che rappresenta il livello attuale del
parametro da modificare
6. Premere i tasti [▲] o [▼] per spostare il led che rappresenta il valore del parametro.
o
7. Rilasciare il tasto [Set]
8. Attendere 10s per uscire dalla programmazione per fine tempo massimo.
10s
Nota: i punti da 3 a 7 possono essere ripetuti durante le stessa fase di programmazione per regolare più parametri
Tabella 10: per cambiare i parametri regolabili Esempio
SET
SET
SET
SET

42
7.2.6) Esempio di programmazione secondo livello (parametri regolabili)
Come esempio viene riportata la sequenza di operazioni per cambiare l'impostazione di fabbrica dei parametri ed aumentare il “Tempo Pau-
sa” a 60s (entrata su L1 e livello su L5) e ridurre la “Forza Motore” per cancelli leggeri (entrata su L5 e livello su L2).
1. Premere e tener premuto il tasto [Set] per circa 3s
3s
2. Rilasciare il tasto [Set] quando il led L1 inizia a lampeggiare
L1
3. Premere e mantenere premuto il tasto [Set]; il tasto [Set] va mantenuto premuto durante tutti
i passi 4 e 5
4. Attendere circa 3s fino a che si accenderà il led L3 che rappresenta il livello attuale
del “Tempo Pausa” L3 3s
5. Premere 2 volte il tasto [▼] per spostare il led acceso su L5 che rappresenta il nuovo valore
del “Tempo Pausa” L5
6. Rilasciare il tasto [Set]
7. Premere 4 volte il tasto [▼] per spostare il led lampeggiante sul led L5
L5
8. Premere e mantenere premuto il tasto [Set]; il tasto [Set] va mantenuto premuto durante
tutti i passi 9 e 10
9. Attendere circa 3s fino a che si accenderà il led L5 che rappresenta il livello attuale
della “Forza Motore” 3s L5
10. Premere 3 volte il tasto [▲] per spostare il led acceso su L2 che rappresenta il nuovo valore
della “Forza Motore” L2
11. Rilasciare il tasto [Set]
12. Attendere 10s per uscire dalla programmazione per fine tempo massimo
10s
Tabella 12: esempio di programmazione secondo livello Esempio
SET
SET
SET
SET
SET
SET
7.3) Aggiunta o rimozione dispositivi
Ad una automazione con ROBUS è possibile aggiungere o rimuove-
re dispositivi in qualsiasi momento. In particolare a “BlueBUS” ed
all'ingresso “STOP” possono essere collegati vari tipi di dispositivi
come indicato nei paragrafi seguenti.
Dopo aver aggiunto o rimosso dei dispositivi è necessario
rifare l'apprendimento dei dispositivi come descritto nel
paragrafo “7.3.6 Apprendimento altri dispositivi”.
7.3.1) BlueBUS
BlueBUS è una tecnica che permette di effettuare i collegamenti dei
dispositivi compatibili con soli due conduttori sui quali transita sia l'a-
limentazione elettrica che i segnali di comunicazione. Tutti i disposi-
tivi vengono collegati in parallelo sugli stessi 2 conduttori di BlueBUS
e senza necessità di rispettare alcuna polarità; ogni dispositivo viene
riconosciuto singolarmente poiché durante l'installazione gli viene
assegnato un indirizzo univoco. A BlueBUS si possono collegare ad
esempio: fotocellule, dispositivi di sicurezza, pulsanti di comando,
spie di segnalazione ecc. La centrale di controllo di ROBUS ricono-
sce uno ad uno tutti i dispositivi collegati attraverso un'opportuna
fase di apprendimento ed è in grado di rilevare con estrema sicurez-
za tutte le possibili anomalie. Per questo motivo ogni volta che viene
aggiunto o tolto un dispositivo collegato a BlueBUS occorrerà ese-
guire nella centrale la fase di apprendimento come descritto nel
paragrafo “7.3.6 Apprendimento altri dispositivi”.
7.2.5) Esempio di programmazione primo livello (funzioni ON-OFF)
Come esempio viene riportata la sequenza di operazioni per cambiare l'impostazione di fabbrica delle funzioni di “Chiusura Automatica” (L1)
e “Chiude Sempre” (L3).
1. Premere e tener premuto il tasto [Set] per circa 3s
3s
2. Rilasciare il tasto [Set] quando il led L1 inizia a lampeggiare
L1
3. Premere una volta il tasto [Set] per cambiare lo stato della funzione associata ad L1
(Chiusura Automatica) ora il led L1 lampeggia con lampeggio lungo L1
4. Premere 2 volte il tasto [▼] per spostare il led lampeggiante sul led L3
L3
5. Premere una volta il tasto [Set] per cambiare lo stato della funzione associata ad L3
(Chiude Sempre) ora il led L3 lampeggia con lampeggio lungo L3
6. Attendere 10s per uscire dalla programmazione per fine tempo massimo
10s
Al termine di queste operazioni i led L1 ed L3 devono rimanere accesi ad indicare che sono attive le funzioni di “Chiusura Automatica” e
“Chiude Sempre”.
Tabella 11: esempio di programmazione primo livello Esempio
SET
SET
SET
SET

43
I
7.3.2) Ingresso STOP
STOP è l'ingresso che provoca l'arresto immediato della manovra
seguito da una breve inversione. A questo ingresso possono essere
collegati dispositivi con uscita a contatto normalmente aperto “NA”,
normalmente chiuso “NC” oppure dispositivi con uscita a resistenza
costante 8,2KΩ, ad esempio bordi sensibili.
Come per BlueBUS, la centrale riconosce il tipo di dispositivo colle-
gato all'ingresso STOP durante la fase di apprendimento (vedere
paragrafo “7.3.6 Apprendimento altri dispositivi”); successivamente
viene provocato uno STOP quando si verifica una qualsiasi variazio-
ne rispetto allo stato appreso.
Con opportuni accorgimenti è possibile collegare all'ingresso STOP
più di un dispositivo, anche di tipo diverso:
• Più dispositivi NA si possono collegare in parallelo tra di loro sen-
za alcun limite di quantità.
• Più dispositivi NC si possono collegare in serie tra di loro senza
alcun limite di quantità.
• Due dispositivi con uscita a resistenza costante 8,2KΩ si posso-
no collegare in parallelo; se vi sono più di 2 dispositivi allora tutti
devono essere collegati “in cascata” con una sola resistenza di
terminazione da 8,2KΩ.
• E' possibile la combinazione di NA ed NC ponendo i 2 contatti in
parallelo con l'avvertenza di porre in serie al contatto NC una resi-
stenza da 8,2KΩ (ciò rende possibile anche la combinazione di 3
dispositivi: NA, NC e 8,2KΩ).
Se l'ingresso STOP è usato per collegare dispositivi con
funzioni di sicurezza solo i dispositivi con uscita a resi-
stenza costante 8,2KΩ garantiscono la categoria 3 di sicu-
rezza ai guasti secondo la norma EN 954-1.
!
FOTO
Fotocellula esterna h = 50
con intervento in chiusura
FOTO II
Fotocellula esterna h = 100
con intervento in chiusura
FOTO 1
Fotocellula interna h = 50
con intervento in chiusura
FOTO 1 II
Fotocellula interna h = 100
con intervento in chiusura
FOTO 2
Fotocellula esterna
con intervento in apertura
FOTO 2 II
Fotocellula interna
con intervento in apertura
FOTO 3
Fotocellula unica che copre tutto
l’automatismo
L'installazione di FOTO 3 assieme a FOTO II richiede che la posi-
zione degli elementi che compongono la fotocellula (TX - RX) rispetti
l'avvertenza riportata nel manuale di istruzioni delle fotocellule.
!
7.3.3) Fotocellule
Il sistema “BlueBUS” consente, tramite l'indirizzamento con gli
appositi ponticelli, il riconoscimento delle fotocellule da parte della
centrale e di assegnare la corretta funzione di rilevazione. L'opera-
zione di indirizzamento va fatta sia sul TX che sul RX (ponendo i pon-
ticelli nello stesso modo) verificando che non vi siano altre coppie di
fotocellule con lo stesso indirizzo.
In un automatismo per cancelli scorrevoli con ROBUS è possibile
installare le fotocellule secondo quanto rappresentato in figura 24.
Dopo l'installazione o la rimozione di fotocellule occorrerà eseguire
nella centrale la fase di apprendimento come descritto nel paragrafo
“7.3.6 Apprendimento altri dispositivi”.
7.3.4) Fotosensore FT210B
Il fotosensore FT210B unisce in un unico dispositivo un sistema di
limitazione della forza (tipo C secondo la norma EN12453) ed un rile-
vatore di presenza che rileva ostacoli presenti sull'asse ottico tra tra-
smettitore TX e ricevitore RX (tipo D secondo la norma EN12453).
Nel fotosensore FT210B i segnali dello stato del bordo sensibile ven-
gono inviati attraverso il raggio della fotocellula integrando i 2 siste-
mi in un unico dispositivo. La parte trasmittente posta sull'anta mobi-
le è alimentata con batterie eliminando così gli antiestetici sistemi di
collegamento; speciali circuiti riducono il consumo della batteria per
garantire una durata fino a 15 anni (vedere i dettagli della stima nel-
le istruzioni del prodotto).
Un solo dispositivo FT210B abbinato ad un bordo sensibile (esem-
pio TCB65) permette di raggiungere il livello di sicurezza del "bordo
primario" richiesto dalla norma EN12453 per qualsiasi "tipo di utiliz-
zo" e "tipo di attivazione".
Il fotosensore FT210B abbinato a bordi sensibili "resistivi" (8,2Kohm),
è sicuro al guasto singolo (categoria 3 secondo EN 954-1). Dispone
di uno speciale circuito anticollisione che evita interferenze con altri
rilevatori anche se non sincronizzati e permette di aggiungere altre
fotocellule; ad esempio, nel caso di transito di veicoli pesanti dove
normalmente si pone una seconda fotocellula a 1m da terra.
Per ulteriori informazioni sulle modalità di collegamento e indirizza-
mento vedere il manuale di istruzioni di FT210B.
24
Tabella 13: indirizzi delle fotocellule
Fotocellula Ponticelli Fotocellula Ponticelli

44
7.3.5) ROBUS in modalità “Slave”
Programmando e collegando opportunamente, ROBUS può funzio-
nare in modalità “Slave” (schiavo); questa modalità di funzionamen-
to viene utilizzata nel caso serva automatizzare 2 ante contrapposte
e si desidera che i movimenti delle ante avvengano in modo sincro-
nizzato. In questa modalità un ROBUS funziona come Master (mae-
stro) cioè comanda le manovre, mentre il secondo ROBUS funziona
come Slave, cioè esegue i comandi inviati dal Master (di fabbrica tut-
ti i ROBUS sono Master).
Per configurare ROBUS come Slave bisogna attivare la funzione di
primo livello “Modo Slave” (vedere tabella 7).
Il collegamento tra il ROBUS Master e ROBUS Slave avviene trami-
te BlueBUS.
In questo caso deve essere rispettata la polarità nel
collegamento fra i due ROBUS come illustrato in figura 26
(gli altri dispositivi continuano a non avere polarità).
Per installare 2 ROBUS in modalità Master e Slave eseguire le
seguenti operazioni:
• Effettuare l'installazione dei 2 motori come illustrato in figura 25. È
indifferente quale motore funziona come Master e quale come Sla-
ve; nella scelta occorre valutare la comodità dei collegamenti ed il
fatto che il comando Passo-Passo sullo Salve consente l'apertura
totale solo dell'anta Slave.
• Collegare i 2 motori come in figura 26.
• Selezionare la direzione della manovra di apertura dei 2 motori
come indicato in figura 25 (vedere anche il paragrafo “4.1 Selezio-
ne della direzione”).
• Alimentare i 2 motori.
• Nel ROBUS Slave programmare la funzione “Modo Slave” (vedere
tabella 7).
• Eseguire l'acquisizione dispositivi sul ROBUS Slave (vedere para-
grafo “4.3 Apprendimento dei dispositivi”).
• Eseguire l'acquisizione dispositivi sul ROBUS Master (vedere para-
grafo “4.3 Apprendimento dei dispositivi).
• Eseguire l'acquisizione della lunghezza delle ante sul ROBUS
Master (vedere paragrafo “4.4 Apprendimento lunghezza dell'an-
ta”).
!
25
26
Nel collegamento di 2 ROBUS in modalità Master-Slave porre attenzione che:
• Tutti i dispositivi devono essere collegati su ROBUS Master (come in fig. 26) compreso il ricevitore radio
• Nel caso di utilizzo di batterie tampone, entrambe i motori devono avere la propria batteria.
• Tutte le programmazioni sul ROBUS Slave vengono ignorate (prevalgono quelle di ROBUS Master) ad esclusione di quelle riportate in tabel-
la 14.
LUCYB
S.C.A.
MOFB
MOSE
OPEN
CLOSE
LUCYB
S.C.A.
STOP
PP

45
I
7.4.1) Funzione “Apri sempre”
La funzione “Apri sempre” è una proprietà della centrale di controllo
che permette di comandare sempre una manovra di apertura quan-
do il comando di “Passo-Passo” ha una durata superiore a 2 secon-
di; ciò è utile ad esempio per collegare al morsetto P.P. il contatto di
un orologio programmatore per mantenere aperto il cancello per una
certa fascia oraria. Questa proprietà è valida qualunque sia la pro-
grammazione dell’ingresso di P.P. ad esclusione della programma-
zione come “Chiude”, vedere parametro “Funzione P.P.” in tabella 9.
7.4.2) Funzione “Muovi comunque”
Nel caso in cui qualche dispositivo di sicurezza non dovesse funzio-
nare correttamente o fosse fuori uso, è possibile comunque coman-
dare e muovere il cancello in modalità “Uomo presente”.
Per i dettagli vedere il paragrafo “Comando con sicurezze fuori uso”
presente nell’allegato “Istruzioni ed avvertenze destinate all’utilizza-
tore del motoriduttore ROBUS”.
7.4.3) Avviso di manutenzione
ROBUS consente di avvisare l’utente quando eseguire un controllo
di manutenzione dell’automazione. Il numero di manovre dopo il
quale avviene la segnalazione è selezionabile tra 8 livelli, mediante il
parametro regolabile “Avviso di manutenzione” (vedere tabella 9).
Il livello 1 di regolazione è “automatico” e tiene conto della gravosità
delle manovre, cioè dello sforzo e della durata della manovra, men-
tre le altre regolazioni sono fissate in base al numero delle manovre.
La segnalazione di richiesta di manutenzione avviene attraverso il lam-
peggiante Flash oppure sulla lampada collegata all'uscita S.C.A.
quando è programmata come "Spia Manutenzione" (vedere tabella 9).
In base al numero di manovre eseguite rispetto al limite programma-
to il lampeggiante Flash e la spia manutenzione danno le segnala-
zioni riportate in tabella 16.
7.4) Funzioni particolari
Tabella 14: programmazioni su ROBUS Slave indipendenti da ROBUS Master
Funzioni di primo livello (funzioni ON – OFF) Funzioni di secondo livello (parametri regolabili)
Stand-by Velocità Motore
Spunto Uscita SCA
Modo Slave Forza Motore
Lista Errori
Nello Slave è possibile collegare:
•
un proprio lampeggiante (Flash)
•
una propria Spia Cancello Aperto (S.C.A.)
•
un proprio bordo sensibile (Stop)
•
un proprio dispositivo di comando (P.P.) che comanda l'apertura totale solo dell'anta Slave.
•
Nello Slave gli ingressi Open e Close non vengono utilizzati
7.3.6) Apprendimento altri dispositivi
Normalmente l’operazione di apprendimento dei dispositivi collegati a BlueBUS ed all’ingresso STOP viene eseguita durante la fase di installazione;
tuttavia se vengono aggiunti o rimossi dispositivi è possibile rifare l’apprendimento come riportato in tabella 15.
1. Premere e tenere premuti i tasti [▲] e [Set]
2. Rilasciare i tasti quando i led L1 e L2 iniziano a lampeggiare molto velocemente (dopo circa 3s)
L1 L2
3. Attendere alcuni secondi che la centrale finisca l’apprendimento dei dispositivi
4. Al termine dell’apprendimento i led L1 e L2 smetteranno di lampeggiare, il led STOP deve rimanere
acceso, mentre i led L1…L8 si accenderanno in base allo stato delle funzioni ON-OFF che rappresentano. L1 L2
Dopo aver aggiunto o rimosso dei dispositivi è necessario eseguire nuovamente il collaudo dell’automazione secondo
quanto indicato nel paragrafo “5.1 Collaudo”.
!
Tabella 15: per l’apprendimento di altri dispositivi Esempio
SET
SET
Numero manovre Segnalazione su Flash Segnalazione si spia manutenzione
Inferiore a 80% del limite
Tra 81 e 100% del limite
Oltre il 100% del limite
Normale (0.5s acceso, 0.5s spento)
A inizio manovra rimane acceso per 2s poi
prosegue normalmente
Ad inizio e fine manovra rimane acceso per
2s poi prosegue normalmente
Accesa per 2s ad inizio apertura
Lampeggia durante tutta la manovra
Lampeggia sempre.
Tabella 16: avviso di manutenzione con Flash e spia manutenzione

46
Verifica del numero di manovre effettuate
Con la funzione di “Avviso di manutenzione” è possibile verificare il numero di manovre eseguite in percentuale sul limite impostato. Per la
verifica procedere come descritto in tabella 17.
1. Premere e tener premuto il tasto [Set] per circa 3s
3s
2. Rilasciare il tasto [Set] quando il led L1 inizia a lampeggiare
L1
3. Premere i tasti [▲] o [▼] per spostare il led lampeggiante sul L7, cioè il “led di entrata” per il
parametro “Avviso si manutenzione” oL7
4. Premere e mantenere premuto il tasto [Set], il tasto [Set] va mantenuto premuto
durante tutti i passi 5, 6 e 7
5. Attendere circa 3s dopodiché si accenderà il led che rappresenta il livello attuale del
parametro “Avviso si manutenzione” 3s
6. Premere e subito rilasciare i tasti [▲] e [▼].
e
7. Il led corrispondente al livello selezionato farà alcuni lampeggi. Il numero di lampeggi identifica la
percentuale di manovre effettuate (in multipli di 10%) rispetto al limite impostato.
Ad esempio: con impostato l’avviso di manutenzione su L6 cioè 10000, il 10% corrisponde a 1000
manovre; se il led di visualizzazione fa 4 lampeggi, significa che è stato raggiunto il 40% delle manovre
(cioè tra 4000 e 4999 manovre). Se non è stato raggiunto il 10% delle manovre non ci sarà nessun
lampeggio.
8. Rilasciare il tasto [Set]
Tabella 17: verifica del numero di manovre effettuate Esempio
SET
SET
SET
SET
.... n=?
Azzeramento contatore manovre
Dopo aver eseguito la manutenzione dell’impianto è necessario azzerare il contatore delle manovre.
Procedere come descritto in tabella 18.
1. Premere e tener premuto il tasto [Set] per circa 3s
3s
2. Rilasciare il tasto [Set] quando il led L1 inizia a lampeggiare
L1
3. Premere i tasti [▲] o [▼] per spostare il led lampeggiante sul L7, cioè il “led di entrata” per il
parametro “Avviso si manutenzione” oL7
4. Premere e mantenere premuto il tasto [Set], il tasto [Set] va mantenuto premuto
durante tutti i passi 5, e 6
5. Attendere circa 3s dopodiché si accenderà il led che rappresenta il livello attuale del
parametro “Avviso si manutenzione” 3s
6. Premere e tenere premuto per almeno 5 secondi i tasti [▲] e [▼], quindi rilasciare i 2 tasti.
Il led corrispondente al livello selezionato eseguirà una serie di lampeggi veloci per segnalare che il
contatore delle manovre è stato azzerato.
e
7. Rilasciare il tasto [Set]
Tabella 18: azzeramento contatore manovre Esempio
SET
SET
SET
SET
7.5 Collegamento altri dispositivi
Se vi fosse l’esigenza di alimentare dispositivi esterni ad esempio un
lettore di prossimità per tessere a transponder oppure la luce d’illu-
minazione del selettore a chiave è possibile prelevare l’alimentazione
come indicato in figura 27. La tensione di alimentazione è 24Vcc -
30% ÷ +50% con corrente massima disponibile di 100mA.
-+
24Vcc
27

47
I
7.7) Diagnostica e segnalazioni
Alcuni dispositivi offrono direttamente delle segnalazioni particolari
attraverso le quali è possibile riconoscere lo stato di funzionamento
o dell’eventuale malfunzionamento.
7.6) Risoluzione dei problemi
Nella tabella 19 è possibile trovare utili indicazioni per affrontare gli
eventuali casi di malfunzionamento in cui è possibile incorrere duran-
te l’installazione o in caso di guasto.
29
Tabella 19: ricerca guasti
Sintomi Verifiche consigliate
Il trasmettitore radio non comanda il cancello ed
il led sul trasmettitore non si accende
Il trasmettitore radio non comanda il cancello
ma il led sul trasmettitore si accende
Non si comanda nessuna manovra ed il led
“BlueBUS” non lampeggia
Non si comanda nessuna manovra ed il lam-
peggiante è spento
Non si comanda nessuna manovra ed il lam-
peggiante fa alcuni lampeggi
La manovra ha inizio ma subito dopo avviene
l'inversione
La manovra viene eseguita regolarmente ma il
lampeggiante non funziona
La manovra viene eseguita regolarmente ma la
spia SCA non funziona
Verificare che le pile del trasmettitore non siano scariche, eventualmente sostituirle
Verificare se il trasmettitore è correttamente memorizzato nel ricevitore radio
Verificare che ROBUS sia alimentato con la tensione di rete.
Verificare che i fusibili non siano interrotti; in questo caso, verificare la causa del guasto
e poi sostituirli con altri dello stesso valore di corrente e caratteristiche.
Verificare che il comando venga effettivamente ricevuto. Se il comando giunge sull'in-
gresso PP il relativo led “PP” deve accendersi; se invece viene utilizzato il trasmettitore
radio, il led “BluBus” deve fare due lampeggi veloci.
Contare il numero di lampeggi e verificare secondo quanto riportato in tabella 21
La forza selezionata potrebbe essere troppo bassa per il tipo di cancello. Verificare se
ci sono degli ostacoli ed eventualmente selezionare una forza superiore
Verificare che durante la manovra vi sia tensione sul morsetto FLASH del lampeggiante
(essendo intermittente il valore di tensione non è significativo: circa 10-30Vcc); se c'è
tensione, il problema è dovuto alla lampada che dovrà essere sostituita con una di
uguali caratteristiche; se non c'è tensione, potrebbe essersi verificato un sovraccarico
sull'uscita FLASH, verificare che non vi sia corto circuito sul cavo.
Verificare il tipo di funzione programmata per l'uscita SCA (Tabella 9)
Quando la spia dovrebbe essere accesa, verificare vi sia tensione sul morsetto SCA
(circa 24Vcc); se c'è tensione, il problema è dovuto alla spia che dovrà essere sostitui-
ta con una di uguali caratteristiche; se non c'è tensione, potrebbe essersi verificato un
sovraccarico sull'uscita SCA. verificare che non vi sia corto circuito sul cavo.
F2
F1
1. Premere e tener premuto il tasto [Set] per circa 3s
3s
2. Rilasciare il tasto [Set] quando il led L1 inizia a lampeggiare
L1
3. Premere i tasti [▲] o [▼] per spostare il led lampeggiante sul L8, cioè il “led di entrata”
per il parametro “Elenco anomalie” oL8
4. Premere e mantenere premuto il tasto [Set], il tasto [Set] va mantenuto premuto
durante tutti i passi 5, e 6
5. Attendere circa 3s dopodiché si accenderanno i led corrispondenti alle manovre che hanno avuto delle
anomalie. Il led L1 indica l’ esito della manovra più recente,il led L8 indica l’esito dell’ottava. Se il led è
acceso significa che durante la manovra si sono verificate delle anomalie; se il led è spento significa che
la manovra è terminata senza anomalie.
6. Premere i tasti i tasti [▲] e [▼] per selezionare la manovra desiderta:
Il led corrispondente farà un numero di lampeggi pari a quelli normalmente eseguiti dal lampeggiante
dopo un’anomalia (vedere tabella 21).
e
7. Rilasciare il tasto [Set]
Tabella 20: storico anomalie Esempio
SET
SET
SET
SET
7.6.1) Elenco storico anomalie
ROBUS permette di visualizzare le eventuali anomalie che si sono verificate nelle ultime 8 manovre, ad esempio l’interruzione di una mano-
vra per l’intervento di una fotocellula o di un bordo sensibile. Per verificare l’elenco delle anomalie precedere come in tabella 20.
3s
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
La pagina si sta caricando...
-
 1
1
-
 2
2
-
 3
3
-
 4
4
-
 5
5
-
 6
6
-
 7
7
-
 8
8
-
 9
9
-
 10
10
-
 11
11
-
 12
12
-
 13
13
-
 14
14
-
 15
15
-
 16
16
-
 17
17
-
 18
18
-
 19
19
-
 20
20
-
 21
21
-
 22
22
-
 23
23
-
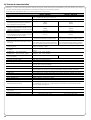 24
24
-
 25
25
-
 26
26
-
 27
27
-
 28
28
-
 29
29
-
 30
30
-
 31
31
-
 32
32
-
 33
33
-
 34
34
-
 35
35
-
 36
36
-
 37
37
-
 38
38
-
 39
39
-
 40
40
-
 41
41
-
 42
42
-
 43
43
-
 44
44
-
 45
45
-
 46
46
-
 47
47
-
 48
48
-
 49
49
-
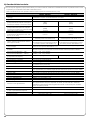 50
50
-
 51
51
-
 52
52
-
 53
53
-
 54
54
-
 55
55
-
 56
56
-
 57
57
-
 58
58
-
 59
59
-
 60
60
-
 61
61
-
 62
62
-
 63
63
-
 64
64
-
 65
65
-
 66
66
-
 67
67
-
 68
68
-
 69
69
-
 70
70
-
 71
71
-
 72
72
-
 73
73
-
 74
74
-
 75
75
-
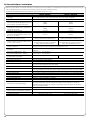 76
76
-
 77
77
-
 78
78
-
 79
79
-
 80
80
-
 81
81
-
 82
82
-
 83
83
-
 84
84
-
 85
85
-
 86
86
-
 87
87
-
 88
88
-
 89
89
-
 90
90
-
 91
91
-
 92
92
-
 93
93
-
 94
94
-
 95
95
-
 96
96
-
 97
97
-
 98
98
-
 99
99
-
 100
100
-
 101
101
-
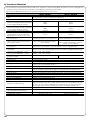 102
102
-
 103
103
-
 104
104
-
 105
105
-
 106
106
-
 107
107
-
 108
108
-
 109
109
-
 110
110
-
 111
111
-
 112
112
-
 113
113
-
 114
114
-
 115
115
-
 116
116
-
 117
117
-
 118
118
-
 119
119
-
 120
120
-
 121
121
-
 122
122
-
 123
123
-
 124
124
-
 125
125
-
 126
126
-
 127
127
-
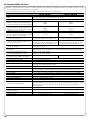 128
128
-
 129
129
-
 130
130
-
 131
131
-
 132
132
-
 133
133
-
 134
134
-
 135
135
-
 136
136
-
 137
137
-
 138
138
-
 139
139
-
 140
140
-
 141
141
-
 142
142
-
 143
143
-
 144
144
-
 145
145
-
 146
146
-
 147
147
-
 148
148
-
 149
149
-
 150
150
-
 151
151
-
 152
152
-
 153
153
-
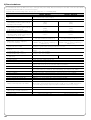 154
154
-
 155
155
-
 156
156
-
 157
157
-
 158
158
-
 159
159
-
 160
160
-
 161
161
-
 162
162
-
 163
163
-
 164
164
-
 165
165
-
 166
166
-
 167
167
-
 168
168
-
 169
169
-
 170
170
-
 171
171
-
 172
172
-
 173
173
-
 174
174
-
 175
175
-
 176
176
-
 177
177
-
 178
178
-
 179
179
-
 180
180
-
 181
181
-
 182
182
-
 183
183
-
 184
184
























































































































































































Nice Robus 600P Instructions And Warnings
- Tipo
- Instructions And Warnings
- Questo manuale è adatto anche per
in altre lingue
- English: Nice Robus 600P
- français: Nice Robus 600P
- español: Nice Robus 600P
- Deutsch: Nice Robus 600P
- Nederlands: Nice Robus 600P
- polski: Nice Robus 600P
Documenti correlati
Altri documenti
-
Nice Automation Robus and Robuskit Manuale del proprietario
-
-
-
-
-
-
-
-
-