Ascon Tecnologic - Serie K_7 - MANUALE INGEGNERISTICO - PAG. 1
K_7
REGOLATORI E
MINI-PROGRAMMATORI CON
CONTROLLO DELLA VELOCITÀ
Manuale ingegneristico
22/06 - Code: ISTR_M_K-7SERIES_I_01_--
Ascon Tecnologic S.r.l.
Viale Indipendenza 56, 27029 Vigevano (PV) - ITALY
Tel.: +39 0381 69871/FAX: +39 0381 698730
www.ascontecnologic.com
e-mail: [email protected]
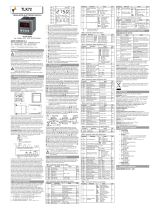
1 DIMENSIONI E FORATURE (mm)
1.1 KR7
1.1.1 Dimensioni
64
6
28
14.5
33.5
78
35
AT
PV
Terminali removibili
Strumento con terminali non removibili
60
18
15
1.1.2 Foratura del pannello
86 mm min.
29+0.6
41 mm min.
71+0.6 mm
1.2 KM7
1.2.1 Dimensioni
48 *
48
PV
AT
1411
40 14.5
8
Terminali
removibili
Strumento con terminali non removibili
48
18
*: Nei modelli con alimentazione universale,
il corpo del regolatore è lungo 63.3 mm.
1.2.2 Foratura del pannello
65 mm min.
65 mm min.
45
+0.6
mm
45
+0.6
mm
1.3 KX7
1.3.1 Dimensioni
Terminali removibili
Strumento con terminali non removibili
96
61.9
14.5
8
DI1 DI2
1411
48
40
18

Ascon Tecnologic - Serie K_7 - MANUALE INGEGNERISTICO - PAG. 2
1.3.2 Foratura del pannello
65 mm min.
113 mm min.
89
+0.8
mm
45
+0.6
mm
1.4 Requisiti per il montaggio
Questi strumenti sono progettati per un’installazione perma-
nente, per l’uso in ambiente coperto e per il montaggio in
quadri elettrici che proteggano la parte posteriore dello stru-
mento, la morsettiera e i collegamenti elettrici. Montare lo
strumento in un quadro che abbia le seguenti caratteristiche:
1. Deve essere facilmente accessibile;
2. Non deve essere sottoposto a vibrazioni o impatti;
3. Non devono essere presenti gas corrosivi;
4. Non deve esserci presenza di acqua o altri fluidi (condensa);
5. La temperatura ambiente deve essere tra 0... 50°C;
6. L’umidità relativa deve rimanere all’interno del campo di
utilizzo (20... 85% RH).
Lo strumento può essere montato su un pannello con uno
spessore massimo di 15 mm.
Per ottenere la massima protezione frontale (IP65), è neces-
sario montare la guarnizione opzionale (KM7 e KX7) oppure
utilizzare il tirante a vite (KR7).
2 COLLEGAMENTI
2.1 Note sui collegamenti elettrici
1. Non cablare i cavi di segnale con i cavi di potenza;
2. Componenti esterni (come le barriere zener) possono
causare errori di misura dovuti a resistenze di linea ecces-
sive o sbilanciate oppure possono dare origine a correnti
di dispersione;
3. Quando si utilizza cavo schermato, lo schermo deve
essere collegato a massa da un solo lato;
4. Fare attenzione alla resistenza di linea, una resistenza di
linea elevata può causare errori di misura..
2.2 Schemi di collegamento
m Se non specificatamente indicato, i seguenti schemi
di collegamento sono validi per tutti i modelli.
Quando le connessioni sono diverse, viene illustrata
la connessione di ciascun modello.
2.2.1 KR7
+
+
+
Out2
Pt1000
Pt100
TC
DI1
Power
Supply
NO NOCC
Out3
DI2
D+GNDD-
RS485
Out Speed
Out1
Out Speed: 24 Vdc/ 4 A max.
Relay Out 1, 2: 2 (1) A/250 Vac SPST NO (*)
SSR Out 1, 2: 10 Vdc/15 mA
SSR Out 3: 12 Vdc/20 mA
* Servodrive models: both Out 1 and Out 2
are to be selected as “M” in Configuration code;
Out 1: open, Out 2: close
Passive TX,
2 wires,
4... 20 mA
0/12... 60 mV,
0/1... 5 V,
0/2... 10 V
4... 20 mA
(active)
24 Vdc
External
PWS
Out + In + In -
Fuse
M
OpenClose
2.2.2 KM7
+ + +
+
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
Out Speed
Out 2
Out 1
C
NO
C
NO
DI1
DI2
Power
supply
12 VDC/20 mA max.
Out Speed: 24Vdc 4 A max.
Relay Out 1, 2: 2 (1) A/250 VAC (*)
SSR Out 1, 2: 10 Vdc/15 mA
SSR Out 3: 12 Vdc/20 mA
* Servodrive models: both Out 1 and Out 2
are to be selected as “M” in Configuration code;
Out 1: open, Out 2: close
Passive TX, 2 wires, 4... 20 mA
Pt1000
Pt100
TC
4... 20 mA (active)
0/12... 60 mV
, 0/1... 5 V, 0/2... 10 V
Out +
In -
In +
24 Vdc
External
PWS
M
Out 2
Out 1
Out 3
Fuse
Open
Close

Ascon Tecnologic - Serie K_7 - MANUALE INGEGNERISTICO - PAG. 3
2.2.3 KX7
+ + +
++
Out Speed
Out 1
Out 2
Out 3
12 VDC/20 mA max.
Speed Output: 24 Vdc, 4A max.
Relay Out 1, 2: 2 (1) A/250 VAC (*)
SSR Out 1, 2: 10 VDC/15 mA
SSR Out 3: 12 VDC/20 mA
* Servodrive models: both Out 1 and Out 2
are to be selected as “M” in Configuration code;
Out 1: open, Out 2: close
Passive TX, 2 wires, 4... 20 mA
Pt1000
Pt100
TC
4... 20 mA (active)
0/12... 60 mV
, 0/1... 5V, 0/2... 10V
-
Out 1
Out 2
C
NO
+
-
C
NO
+
-
DI1
DI2
Power
supply
Analogue
Input
Open
Close
24 Vdc
External
PWS
Out +
In +
In -
Fuse
M
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
2.3 Ingressi
2.3.1 Ingressi da termocoppia
12
+-
Corrente continua per verifica continuità: 250 nA.
Giunto freddo: Compensazione automatica fra 0... 50°C.
Deriva termica giunto freddo: 0.1°C/°C dopo un preriscal-
damento di 20 minuti.
Impedenza di ingresso: > 1 MΩ.
Calibrazione: Secondo la normativa EN 60584-1.
Nota: Utilizzare un cavo compensato corrispondente al tipo
di termocoppia impiegata possibilmente schermato.
2.3.2 Ingresso da sensori all’infrarosso
Exergen
12
+-
Resistenza esterna: Non rilevante.
Giunto freddo: Compensazione automatica fra 0... 50°C.
Deriva termica giunto freddo: 0.1°C/°C.
Impedenza di ingresso: > 1 MΩ.
2.3.3 Ingresso da termoresistenza Pt 100
12
3
RTD
Circuito d’ingresso: Iniezione di corrente (150 µA).
Resistenza di linea: Compensazione automatica fino a
20Ω/filo, errore max. 0.3°C.
Calibrazione: Secondo la normativa EN 60751/A2.
Nota: La resistenza dei 3 fili deve essere la stessa.
2.3.4 Ingresso da Pt 1000, NTC e PTC
2 3
Pt1000
Resistenza di linea: Non compensata.
Circuito di ingresso Pt 1000: Iniezione di corrente (15 µA).
Calibrazione Pt 1000: Secondo la normativa EN 60751/A2.
2.3.5 Ingresso in tensione (V e mV)
mV
V
+-
+-
12
Impedenza di ingresso: > 1 MΩ per l’ingresso in mV
500 kΩ per l’ingresso in V.

Ascon Tecnologic - Serie K_7 - MANUALE INGEGNERISTICO - PAG. 4
2.3.6 Ingresso in corrente (mA)
Collegamento ingresso da 0/4... 20 mA per trasmet-
titore passivo con alimentazione ausiliaria interna
1 2 34
4...20 mA
2 wires
Transmitter
+-
Impedenza di ingresso: < 53Ω.
Alimentazione ausiliaria interna: 12 VDC (±20%), 20 mA max..
Collegamento ingresso da 0/4... 20 mA per trasmet-
titore passivo con alimentazione ausiliaria esterna
0/4...20 mA
passive
transmitter
Ext.
PWS
+
1 2
+-
+-
-
Collegamento ingresso da 0/4... 20 mA per
trasmettitore attivo
0/4... 20 mA
active
transmitter
1 2
+-
+-
2.3.7 Ingressi digitali
INGRESSO DIGITALE COMANDATO DA CONTATTO PULITO
Resistenza di contatti: 100 Ω max.;
Portata dei contatti: DI1 = 10 V, 6 mA;
DI2 = 12 V, 30 mA.
INGRESSO DIGITALE COMANDATO IN TENSIONE 24VDC
Stato logico 1: 6... 24 VDC;
Stato logico 0: 0... 3 VDC.
Note relative alla sicurezza:
–Non cablare i cavi degli ingressi logici insieme ai cavi di potenza;
–Lo strumento necessita di almeno 150 ms per riconoscere
la variazione di stato del contatto;
–Gli ingressi logici NON sono isolati dall’ingresso di misura.
Il contatto esterno deve assicurare un isolamento doppio o
rinforzato tra l’ingresso logico e la linea di potenza.
KR7
INGRESSO DIGITALE COMANDATO DA CONTATTO PULITO
Digital
input 1
Digital
input 2
5 6 114
INGRESSO DIGITALE COMANDATO IN TENSIONE 24VDC
Digital
input 1
Digital
input 2
5 6 114
+-
KM7
INGRESSO DIGITALE COMANDATO DA CONTATTO PULITO
Digital
Input 2
4
15
16 Digital
Input 1
INGRESSO DIGITALE COMANDATO IN TENSIONE 24VDC
+
-
Digital
Input 2
4
15
16 Digital
Input 1
KX7
INGRESSO DIGITALE COMANDATO DA CONTATTO PULITO
Digital
input 1
4
5
6
Digital
input 2
INGRESSO DIGITALE COMANDATO IN TENSIONE 24VDC
Digital
input 1
Digital
input 2 4
5
6
+
-

Ascon Tecnologic - Serie K_7 - MANUALE INGEGNERISTICO - PAG. 5
2.4 Uscite
Note relative alla sicurezza:
–Per evitare scosse elettriche, collegare i cavi di potenza
dopo aver effettuato tutti gli altri collegamenti.
–Per il collegamento alla rete, utilizzare cavi AWG 16 o mag-
giori e adatti per una temperatura di almeno 75°C;
–Utilizzare solo cavi in rame.
–Le uscite SSR non sono isolate. Il relè allo stato solido
esterno deve garantire un isolamento rinforzato.
–Per le uscite SSR, mA e V si utilizzi un cavo schermato
qualora la linea dovesse superare i 30 m di lunghezza.
m
Prima di collegare gli attuatori delle uscite, si racco-
manda di configurare i parametri per adattarli all’appli-
cazione (tipo di ingresso, modo di regolazione, allarmi,
intervento delle uscite, ecc.).
2.4.1 Uscita di controllo velocità
Caratteristiche uscitadi controllo velocità
Tensione nominale: 24 VDC;
Corrente nominale: 4 A max..
KR7
Speed Output
M
Fuse 24 Vdc
External
PWS
22 23 24
Out + In -In +
KM7
7
6
8
Speed Output
24 Vdc
External
PWS
M
Fuse
Out +
In +
In -
KX7
9
8
10
24 Vdc
External
PWS
M
Fuse Out Speed
Out +
In +
In -
2.4.2 Uscita 1 (OP1)
Caratteristiche uscita a relè
Portata dei contatti: • 2 A /250 V cosj = 1;
• 1 A /250 V cosj = 0.4.
Vita operativa: 1 x 105.
Caratteristiche uscita SSR
Livello logico 0: Vout < 0.5 VDC;
Livello logico 1: 12 V ± 20%, 15 mA max..
KR7
USCITA A RELÈ
18
17
CNO
USCITA SSR
18
17
SSR
+-
+-
KM7
USCITA A RELÈ
C
NO
13
14
USCITA SSR
SSR
-
+
13
14
KX7
USCITA A RELÈ
C
NO
11
12
USCITA SSR
SSR
-
+
11
12

Ascon Tecnologic - Serie K_7 - MANUALE INGEGNERISTICO - PAG. 6
2.4.3 Uscita 2 (OP2)
Caratteristiche uscita a relè
Portata dei contatti: • 2 A /250 V cosj = 1;
• 1 A /250 V cosj = 0.4.
Vita operativa: 1 x 105.
Caratteristiche uscita SSR
Livello logico 0: Vout < 0.5 VDC;
Livello logico 1: 12 V ± 20%, 15 mA max..
KR7
USCITA SSR
16
15
CNO
USCITA A RELÈ
16
15
SSR
+-
+-
KM7
USCITA SSR
C
NO
11
12
USCITA A RELÈ
SSR
-
+
11
12
KX7
USCITA SSR
C
NO
13
14
USCITA A RELÈ
SSR
-
+
13
14
Uscite servomotore OP1 e OP2
CARATTERISTICHE USCITE SERVOMOTORE
Portata dei contatti: • 2 A /250 V cosj = 1;
• 1 A /250 V cosj = 0.4.
Vita operativa: 1 x 105.
KR7
NOCCNO
Out2 Out1
OpenClose
18
17
16
15
KM7
Open
Close
NO
13
14
C
C
NO
11
12 Out2
Out1
KX7
Out1
Out2
Open
Close
C
NO
11
12
C
NO
13
14
2.4.4 Uscita 3 (OP3)
Caratteristiche Uscita SSR
Livello logico 0: Vout < 0.5 VDC;
Livello logico 1: 12 V ± 20%, 15 mA max..
Nota: L’uscita è protetta da sovraccarichi.
KR7
SSR
+-
+- 114
Out3
KM7
SSR
+
-
4
Out3 4
16
KX7
SSR
+
-
4
5
Out3

Ascon Tecnologic - Serie K_7 - MANUALE INGEGNERISTICO - PAG. 7
2.5 Interfaccia seriale
Nota: L’interfaccia seriale è disponibile solo per il modello KR7.
KR7
9 10
8
GND
D+
D-
C
D+
D-
D+
D-
RS485
D +D -
Tipo di interfaccia: Isolata (50 V) RS-485;
Livelli di tensione: Secondo la normativa EIA standard;
Tipo di protocollo: MODBUS RTU;
Formato dei dati: 8 bit senza parità;
bit di Stop: 1 (uno);
Velocità di linea:
Programmabile tra 1200... 38400 baud;
Indirizzo:
Programmabile tra
1... 255.
Note: 1. L’interfaccia seriale RS-485 permette di collegare
fino a 30 strumenti con un unico master remoto.
2. La lunghezza del cavo non deve superare i 1500 m
alla velocità di comunicazione di 9600 baud.
2.6 Alimentazione
Tensione: • 24 VAC/DC (±10%);
• 100... 240 VAC (-15... +10%);
• 24... 240 VAC (±10%) solo KM7.
Note: 1. Prima di collegare lo strumento alla rete elettrica,
assicurarsi che la tensione di linea sia corrispon-
dente a quanto indicato nell’etichetta di identifica-
zione dello strumento;
2. La polarità è ininfluente;
3. L’ingresso di alimentazione NON è protetto da
fusibile. È necessario prevedere esternamente un
fusibile tipo T 1A, 250 V;
4. Quando lo strumento è alimentato attraverso la
chiave di programmazione A01, le uscite NON
sono alimentate e lo strumento potrebbe visualiz-
zare la scritta ouLd (Out 4 Overload).
KR7
Power
Supply 910
Neutral Line
KM7
Power Supply
9
10
Neutral
Line
KX7
Power Supply
15
16
Neutral
Line
3 CARATTERISTICHE TECNICHE
Custodia: Plastica autoestinguente UL94 V0
;
Protezione frontale: IP65 con guarnizione opzionale per
KM7/KX7 o con tirante a vite opzionale per KR7; per uso al
coperto secondo la normativa EN 60070-1;
Protezione terminali: IP20 secondo la normativa EN 60070-1;
Installazione: Montaggio frontequadro;
Morsettiera
:
• KR7: 24 terminali a vite M3/molla, per cavi da 0.25... 2.5 mm2
(AWG 22... AWG 14) con schema di collegamento,
• KM7 and KX7: 16
terminali a vite M3/molla, per cavi da
0.25... 2.5 mm2 (AWG22... AWG14) con schema di colle-
gamento;
Dimensioni:
• KR7: 78 x 35
profondità
69.5 mm
(3.07 x 1.37
profondità
2.73 in.),
• KM7: 48 x 48 mm (1.77 x 1.77 in.), profondità
75.5... 102 mm (2.97... 3.93 in.) a seconda del modello
selezionato e del tipo di terminali utilizzato,
• KX7: 48 x 96, profondità 75.9 mm
(1.77 x 3.78 profondità 2.99 in.);
Foratura pannello:
• KR7:
71 (+0.6) x 29 (+0.6) mm [2.79 (+0.023) x 1.14 (+0.023) in.]
,
• KM7:
45 (+0.6) x 45 (+0.6) mm [1.78 (+0.023) x 1.78 (+0.023) in.]
,
• KR7:
45 (+0.6) x 89 (+0.6) mm [1.78 (+0.023) x 3.5 (+0.023) in.]
;
Peso:
• KR7:
180 g max.,
• KM7:
126... 151 g a seconda del modello selezionato;
• KX7: 160
g max.;
Alimentazione:
• 24 VAC/DC (±10% della tensione nominale),
• 100... 240 VAC (-15... +10% della tensione nominale),
• 24... 240 VAC/DC (±10% della tensione nominale) solo KM7;
Consumo di corrente: 3 VA max.;
Tensione di isolamento: 3000 Vrms secondo EN 61010-1;
Tempo di aggiornamento display: 500 ms;
Tempo di campionamento: 130 ms;
Risoluzione: 30000 conteggi;
Precisione totale: ±0.5% F.S.V. ±1 digit @ 25°C di tempera-
tura ambiente;
Deriva termica: Compresa nella precisione totale;
Temperatura di funzionamento: 0... 50°C (32... 122°F);
Temperatura di stoccaggio: -30... +70°C (-22... +158°F);
Umidità: 20... 85% RH senza formazione di condensa.
Display:
• KR7: Principale: 4 cifre altezza 10.9 mm a 3 colori
dinamici/fissi, Secondario: 4 cifre altezza 6 mm verdi,
• KM7: Principale: 4 cifre altezza 15.5 mm a 3 colori
dinamici/fissi, Secondario: 4 cifre altezza 7.6 mm verdi,
• KX7: Principale: 4 cifre altezza 15.5 mm a 3 colori
dinamici/fissi, Secondario: 4 cifre altezza 7.6 mm verdi +
un bargraph a 21 segmenti,
Compatibilità elettromagnetica e requisiti di sicurezza
EMC: secondo EN 61326-1,
Sicurezza: secondo EN 61010-1;
Categoria di installazione: II;
Grado di inquinamento: 2.

Ascon Tecnologic - Serie K_7 - MANUALE INGEGNERISTICO - PAG. 8
4 COME ORDINARE
4.1 KR7, KM7 e KX7
Modello
Formato 78 x 35 mm
KR7 = Regolatore con controllo retroazionato della velocità del nastro
KR7T = Regolatore con controllo della velocità + timer
KR7P = Regolatore con controllo della velocità + timer + programmatore
Formato 48 x 48 mm
KM7 = Regolatore con controllo retroazionato della velocità del nastro
KM7T = Regolatore con controllo della velocità + timer
KM7P = Regolatore con controllo della velocità + timer + programmatore
Formato 48 x 96 mm
KX7 = Regolatore con controllo retroazionato della velocità del nastro
KX7T = Regolatore con controllo della velocità + timer
KX7P = Regolatore con controllo della velocità + timer + programmatore
Alimentazione
H = 100... 240 VAC
L = 24 VAC/DC
U = 24... 240 VAC/DC (solo KM7)
Ingresso analogico + Ingresso digitale DI1 (standard)
C = J, K, R, S, T, PT100, PT 1000 (2 fili), mA, mV, V
E = J, K, R, S, T, NTC, PTC, mA, mV, V
Uscita SPEED
S = Uscita PWM per pilotaggio motore 24 Vdc 4A
Uscita 1
M = Relè SPST-NA 2 A (nota)
O = VDC per SSR
R = Relè SPST-NA 2 A (carico resistivo)
Uscita 2
- = Non disponibile
M = Relè SPST-NA 2 A (nota)
O = VDC per SSR
R = Relè SPST-NA 2 A (carico resistivo)
Ingresso/Uscita 3
D = Uscita 3 (VDC per SSR)/Alimentaz. trasmettitore/Ingr. dig. DI2
Tipo di collegamento
- = Standard (morsettiera a vite non estraibile)
E = Con morsettiera a vite estraibile
M = Con morsettiera a molla estraibile
N = Con morsettiera estraibile (solo parte fissa)
Comunicazione seriale
(solo KR7)
- = TTL Modbus
S = RS485 Modbus + TTL Modbus
Imballo + Tipo di staffa (solo KR7)
- = Standard (imballo AT + staffe a “farfalla”)
V = Imballo AT + Tirante a vite per IP65
Nota: Per ordinare i modelli per comando servomotore,
Uscita 1 e Uscita 2 devono essere compilate col
codice “M”.

Ascon Tecnologic - Serie K_7 - MANUALE INGEGNERISTICO - PAG. 9
5 PROCEDURA DI CONFIGURAZIONE
5.1 Una breve introduzione
La K_7 è una famiglia di prodotti è in grado di controllare con-
temporaneamente la velocità di un motore in corrente continua
ed una variabile di processo (ad esempio una temperatura).
Il controllo del motore in corrente continua è in grado di
mantenere la velocità programmata anche in presenza di
variazioni di carico o di alimentazione senza la necessità di
un sensore di velocità aggiuntivo.
In parallelo, il dispositivo è in grado di eseguire un controllo
PID oppure ON/OFF di una variabile di processo indipen-
dente. Le due azioni sono indipendenti ma è anche possibile
creare correlazioni specifiche tra di loro.
Ad esempio è possibile creare 4 ricette. Una ricetta è la
relazione tra un Set Point e una velocità.
L’esempio più comune è il processo del forno per pizze a na-
stro trasportatore. La cottura è la combinazione di una tem-
peratura ed un tempo, quindi possiamo chiamarla “ricetta”.
In un forno a nastro la “velocità” ed il “tempo” sono correlati
ma l’utente finale è abituato a impostare un tempo (e non
una velocità).
I K_7 sono in grado di gestire un tempo ed impostare la ve-
locità per ottenere il tempo desiderato. La relazione tra velo-
cità e tempo è facilmente programmabile (dall’utente finale)
utilizzando un sistema di calibrazione semi-automatico.
La possibilità di gestire una valvola a 3 punti (uscita di control-
lo del servomotore) completa l’applicabilità di questo prodotto.
5.2 Prima di cominciare
Questi strumenti possono essere pre-impostati per essere
usati con due modalità di utilizzo differenti:
Modo 1) Full - lo strumento effettuerà un controllo di proces-
so più il controllo di velocità;
Modo 2) Speed - lo strumento effettuerà solo il controllo di
velocità.
La pre-impostazione avviene caricando uno dei 2 set di pa-
rametri di default disponibili. Il capitolo seguente descrive la
procedura utilizzata per caricare il set di default desiderato.
5.3 Reset di fabbrica - caricamento
dei parametri di default
A volte, ad esempio quando si riconfigura uno strumento utiliz-
zato in precedenza per un’applicazione diversa, oppure da altri
o si sono fatti test con uno strumento e si desidera riconfigurar-
lo, può essere utile poter ricaricare la configurazione di fabbrica.
Questa azione consente di riportare lo strumento ad una
condizione definita (come era alla prima accensione).
I dati di default sono i dati caricati nello strumento dalla fab-
brica prima della spedizione dell’apparecchio.
Per questa famiglia di strumenti solo questa procedura
consente di selezionare anche la modalità operativa globale
eseguita. Come abbiamo detto al paragrafo 5.2, questi stru-
menti sono in grado di operare in due modi:
Modo 1) Full - lo strumento effettuerà un controllo di proces-
so più il controllo di velocità;
Modo 2) Speed - lo strumento effettuerà solo il controllo di
velocità.
Per ricaricare i dati di default procedere come segue:
1. Premere il tasto , il display superiore visualizzerà
PASS mentre quello inferiore visualizzerà 0.
2. Utilizzando i tasti / impostare la password desiderata:
-481 Se si desidera utilizzare la modalità FULL,
-418 Se si desidera utilizzare la modalità SPEED;
3. Premere il tasto ;
4. Lo strumento dapprima spegnerà tutti i LED, poi visua-
lizzerà il messaggio dFLt (default), in seguito accenderà
tutti i LED per 2 secondi. A questo punto lo strumento si
comporterà come se fosse stato riacceso evidenziando la
modalità d’so selezionata (“FULL” per il Modo 1 oppure
“SPEd” per il Modo 2).
La procedura è completa.
Note: 1. Il modo d’uso selezionato verrà sempre visualizza-
to all’accensione.
2. L’elenco di tutti i parametri e corrispondenti valori
di default è disponibile in al termine della descri-
zione di ciascun modo operativo.
5.4 Introduzione
Lo strumento, quando viene alimentato, comincia immediata-
mente a funzionare rispettando i valori dei parametri memo-
rizzati in quel momento.
Il comportamento dello strumento e le sue prestazioni sono in
funzione dei valori dei parametri memorizzati.
Lo strumento è configurato dalla fabbrica per funzionare in
Modo 1 (Full).
Alla prima accensione lo strumento utilizzerà i dati di “de-
fault” (parametri di fabbrica). Questo insieme di parametri
sono di tipo generico (esempio: l’ingresso è programmato
per una termocoppia tipo J).
m
Prima di collegare gli attuatori delle uscite, si
raccomanda di configurare i parametri per adattarli
all’applicazione (tipo di ingresso, modo di regolazione,
allarmi, intervento delle uscite, ecc.).
m
Non si cambi il parametro [6] Unità (Engineering
Unit) durante il controllo di processo; i valori inseriti
dall’utente (Setpoint, soglie, limiti ecc.) non sono risca-
lati automaticamente dallo strumento.
Per modificare l’impostazione dei parametri è necessario
eseguire la “Procedura di configurazione”.
6 MODO 1 PROCEDURA DI CONFIGURAZIONE
Tutte le procedure descritte in questo capitolo sono relative
alla modalità operativa MODO 1 - FULL.
6.1 Comportamento dello strumento
all’accensione
All’accensione lo strumento partirà in uno dei seguenti modi,
in funzione della specifica configurazione:
Modo Automatico senza la funzione programmatore
–Il display superiore visualizza il valore misurato;
–Il display inferiore visualizza il valore del Set Point operativo;
–Il punto decimale della cifra meno significativa del display
inferiore è spento;
–Lo strumento sta eseguendo la normale regolazione
.
Modo manuale (oPLo)
–Il display superiore visualizza il valore misurato.
–Il display inferiore visualizza la potenza di uscita [preceduta
da H (riscaldamento) o c (raffreddamento)](MAN acceso).
–Lo strumento NON sta eseguendo la regolazione automatica.
–La potenza di uscita è pari a 0% oppure pari alla potenza
impostata prima dello spegnimento e può essere modifica-
ta manualmente tramite i tasti e .

Ascon Tecnologic - Serie K_7 - MANUALE INGEGNERISTICO - PAG. 10
Modo Stand by (St.bY)
–Il display superiore visualizza il valore misurato;
–Il display inferiore visualizza alternativamente il valore del
Set Point operativo ed il messaggio St.bY oppure od;
–Lo strumento NON sta eseguendo alcun tipo di regolazio-
ne (le uscite regolanti sono spente);
–Lo strumento si comporta come un indicatore.
Modo Automatico con partenza del programma
all’accensione
–Il display superiore visualizza il valore misurato;
–Il display inferiore visualizza una delle seguenti informazioni:
• Il Set Point operativo (quando esegue una rampa);
• Il tempo del segmento in esecuzione (quando sta ese-
guendo una stasi);
• Il valore misurato alternato al messaggio St.bY;
–In tutti i casi il punto decimale della cifra meno significativa
del display inferiore è acceso.
Il motore si avvia con la stessa velocità impostata
allo spegnimento
–Il display superiore mostra la velocità del motore (SPEED);
–Il display inferiore mostra l’acronimo della velocità attiva
selezionata;
–Il LED del motore (n° 4) è acceso.
Il motore NON parte e attende un comando di avvio
–Il display superiore mostra la velocità del motore (SPEED);
–Il display inferiore mostra l’acronimo della velocità attiva
selezionata;
–Il LED del motore (n° 4) è spento.
Il motore inizia con la velocità 0 fino a quando la
variabile controllata raggiunge il valore desiderato
–Il display superiore mostra la velocità del motore (SPEED);
–Il display inferiore mostra l’acronimo della velocità attiva
selezionata;
–l LED del motore (n° 4) lampeggia fino a che la variabile
controllata non raggiunge il Set Point.
Noi definiamo una qualunque di queste visualizzazioni
“visualizzazione normale” (o standard display).
6.2 Livello Configurazione
6.2.1 Come accedere al livello Configurazione
Il metodo di configurazione “Completo” poiché permette di
sfruttare tutte le potenzialità dello strumento.
Nota: Lo strumento visualizza solo i parametri coerenti con
l’hardware presente e in conformità con il valore asse-
gnato ai parametri precedenti
(es.: se si imposta un’u-
scita come “Non utilizzata” lo strumento nasconderà
tutti i parametri collegati con quella uscita)..
I parametri di configurazione sono riuniti in Gruppi. Ciascun
Gruppo definisce tutti i parametri relativi ad una specifica
funzione (regolazione, allarmi, funzioni delle uscite).
1. Premere il tast
o
per oltre 5 s.
Il display superiore
visualizzerà PASS mentre quello inferiore visualizzerà 0
.
2. Coi tasti
e
impostare la password programmata.
Note: 1. La password inserita dalla fabbrica per impostare i
parametri di configurazione è 30.
2. Durante la modifica dei parametri lo strumento
continua eseguire il controllo.
In alcuni casi, quando la modifica dei parametri
può generare un’azione forte sul processo, potreb-
be essere conveniente fermare temporaneamente
il controllo durante la procedura configurazione (le
uscite regolanti si spegneranno). In questo caso
impostare una password pari a 2000 + la pas-
sword programmata (es. 2000 + 30 = 2030).
La regolazione ripartirà automaticamente all’uscita
dalla procedura di configurazione.
3. Premere il tast
o
.
Se la password è corretta il display
visualizzerà l’acronimo del primo gruppo di parametri prece-
duto dal simbolo: ]
.
In altre parole il display superiore visualizzerà:
]inp
(parametri di Configurazione degli ingressi).
Lo strumento è in modo configurazione.
6.2.2 Come uscire dal “Modo configurazione”
Premere per più di 5 secondi, lo strumento tornerà allo
“Standard display”.
6.3 Funzione dei tasti durante la
modifica dei parametri
Brevi pressioni consentono di uscire dall’attuale grup-
po di parametri e selezionare un nuovo gruppo.
Una pressione prolungata consente di terminare la
procedura di configurazione (lo strumento torna allo
“Standard display”).
Quando il display superiore dello strumento visualiz-
za un gruppo e quello inferiore è vuoto, questo tasto
consente di entrare nel gruppo selezionato. Quando il
display superiore dello strumento visualizza un para-
metro e quello inferiore il suo valore, questo tasto con-
sente di memorizzare il valore impostato e passare al
parametro successivo, all’interno dello stesso gruppo.
Incrementa il valore del parametro selezionato.
Decrementa il valore del parametro selezionato.
+ Questi 2 tasti permettono di tornare al gruppo
precedente. Si proceda come segue:
Premereil tasto e mentre viene tenuto premuto
premere il tasto ; rilasciare entrambi tasti.
Nota: La selezione dei gruppi è ciclica così come la selezio-
ne dei parametri all’interno dei gruppi.
6.4 MODO 1 - FULL elenco dei
parametri di configurazione
Nelle pagine seguenti descriveremo tutti i parametri dello
strumento quando è preimpostato in modalità 1 (FULL).
m In ogni caso lo strumento visualizzerà solo i pa-
rametri relativi alle opzioni hardware presenti e in
accordo all’impostazione fatta per i parametri prece-
denti (esempio: impostando AL1t [tipo di Allarme 1]
uguale a nonE [non utilizzato], tutti i parametri relativi
all’allarme 1 verranno omessi).

Ascon Tecnologic - Serie K_7 - MANUALE INGEGNERISTICO - PAG. 11
Gruppo ]
inP -
Configurazione degli ingressi
[1] SEnS - Tipo di ingresso
Disponibile:
Sempre.
• Quando nel codice d’ordine è stato selezionato
c
come “Tipo di ingresso” (si veda “Come ordinare”)
.
J TC J (-50... +1000°C/-58... +1832°F);
crAL TC K (-50... +1370°C/-58... +2498°F);
S TC S (-50... +1760°C/-58... +3200°F);
r TC R (-50... +1760°C/-58... +3200°F);
t TC T (-70... +400°C/-94... +752°F);
ir.J Exergen IRS J
(-46... +785°C/-50... +1445°F);
ir.cA Exergen IRS K
(-46... +785°C/-50... +1445°F);
Pt1
RTD Pt100
(-200... +850°C/-328... +1562°F);
Pt10
RTD Pt1000
(-200... +850°C/-328... +1562°F);
0.60 0... 60 mV lineare;
12.60 12... 60 mV lineare;
0.20 0... 20 mA lineare;
4.20 4... 20 mA lineare;
0.5 0... 5 V lineare;
1.5 1... 5 V lineare;
0.10 0... 10 V lineare;
2.10 2... 10 V lineare.
• Quando nel codice d’ordine è stato selezionato
e
come “Tipo di ingresso” (si veda “Come ordinare”)
.
J TC J (-50... +1000°C/-58... +1832°F);
crAL TC K (-50... +1370°C/-58... +2498°F);
S TC S (-50... +1760°C/-58... +3200°F);
r TC R (-50... +1760°C/-58... +3200°F);
t TC T (-70... +400°C/-94... +752°F);
ir.J Exergen IRS J
(-46... +785°C/-50... +1445°F);
ir.cA Exergen IRS K
(-46... +785°C/-50... +1445°F);
Ptc PTC (-55... +150°C/-67... +302°F);
ntc NTC (-50... +110°C/-58... +230°F);
0.60 0... 60 mV lineare;
12.60 12... 60 mV lineare;
0.20 0... 20 mA lineare;
4.20 4... 20 mA lineare;
0.5 0... 5 V lineare;
1.5 1... 5 V lineare;
0.10 0... 10 V lineare;
2.10 2... 10 V lineare.
Note: 1. Quando si seleziona un ingresso da termocoppia
e si imposta una cifra decimale, il valore massimo
visualizzabile risulta essere 999.9°C o 999.9°F.
2. Ogni cambiamento di impostazione del parametro
SEnS forzerà il parametro [2] dP = 0 e farà cam-
biare tutti i parametri ad esso collegati (Set Point,
banda proporzionale ecc.).
[2] dP - Posizione punto decimale
Disponibile:
Sempre.
Campo: • Quando [1] SenS = ingresso lineare: 0... 3;
• Quando [1] SenS diverso da ingresso lineare: 0... 1.
Nota: Ogni variazione del parametro dP produrrà una
variazione dei parametri ad esso collegati (Set Point,
banda proporzionale, ecc.).
[3] SSc - Inizio scala per ingressi lineari
Disponibile:
Quando, tramite il parametro [1] SEnS, è stato
selezionato un ingresso lineare.
Campo: -1999... 9999.
Note: 1. Consente di definire, per gli ingressi lineari, il
valore da visualizzare quando lo strumento misura
il minimo valore misurabile per la scala di ingresso
selezionata.
Es.: SEns = 12.60 e SSC = 15 (l/min) indica che:
se lo strumento legge 12 mV, visualizza 15 (l/min).
Lo strumento può visualizzare valori fino al 5% in-
feriori al valore impostato per SSc e, oltre la soglia
del 5%, visualizzerà la segnalazione di underrange.
2. È possibile impostare una visualizzazione di inizio
scala inferiore alla visualizzazione di fondo scala
per ottenere usa scala di visualizzazione inversa.
Es. 0 mA = 0 mbar and 20 mA = -1000 mbar (vuoto).
[4] FSc - Fondo scala per ingressi lineari
Disponibile:
Quando, tramite il parametro [1] SEnS, è stato
selezionato un ingresso lineare.
Campo: -1999... 9999.
Note: 1. Consente di definire, per gli ingressi lineari, il va-
lore da visualizzare quando lo strumento misura il
massimo valore misurabile per la scala di ingresso
selezionata.
Es.: SEns = 12.60 e FSC = 500 (l/min) indica che:
se lo strumento legge
60 mV
, visualizza
500 (l/min).
Lo strumento può visualizzare valori fino al 5% su-
periori al valore impostato per FSc e, oltre la soglia
del 5%, visualizzerà la segnalazione di
overrange.
2. È possibile impostare una visualizzazione di inizio
scala inferiore alla visualizzazione di fondo scala
per ottenere usa scala di visualizzazione inversa.
Es. 0 mA = 0 mbar e 20 mA = - 1000 mbar (vuoto).
[5] unit - Unità ingegneristiche
Disponibile:
Quando, tramite il parametro [1] SEnS, è stato
selezionato un sensore di temperatura.
Campo: °c Gradi Centigradi;
°F Gradi Fahrenheit.
m
Lo strumento NON riscala i valori di temperatura inse-
riti dall’utente (soglie, limiti, Set Point ecc.).
[6] FiL - Filtro digitale sul valore misurato
Disponibile:
Sempre.
Campo: oFF (No filter);
0.1... 20.0 s.
Nota: Questo è un filtro del primo ordine applicato al valore
misurato. Per questa ragione influenza sia il valore
misurato sia l’azione di regolazione sia il comporta-
mento degli allarmi.
[7] inE - Selezione del tipo di fuori campo che
abilita il valore di uscita di sicurezza
Disponibile:
Sempre.
Campo: our
Quando lo strumento rileva un overrange o un
underrange, forza la potenza di uscita dello stru-
mento al valore di sicurezza [8] oPE.
or Quando lo strumento rileva un overrange,
forza la potenza di uscita dello strumento al
valore di sicurezza [8] oPE.
ur Quando lo strumento rileva un underrange,
forza la potenza di uscita dello strumento al
valore di sicurezza [8] oPE.

Ascon Tecnologic - Serie K_7 - MANUALE INGEGNERISTICO - PAG. 12
[8] oPE - Valore di sicurezza della potenza di uscita
Disponibile:
Sempre.
Campo: -100... 100% (dell’uscita).
Note: 1. Quando lo strumento è programmato per eseguire
una sola azione regolante (riscaldamento o raffred-
damento), impostando un valore inferiore al campo
di uscita, lo strumento utilizza il valore zero.
Es.: Quando è programmata una azione di solo
riscaldamento e oPE è uguale a -50% (raffredda-
mento) lo strumento utilizzerà il valore zero.
2. Quando è stato selezionato un controllo ON/OFF
e
lo strumento rileva una condizione di fuori campo,
lo strumento utilizzerà un tempo di ciclo pari a 20
secondi per poter fornire la potenza programmata
tramite questo parametro.
[9] io3.F - Selezione della funzione dell’I/O3
Disponibile:
Sempre.
Campo: on Out 3 sempre ad ON (usato come alimenta-
zione di un trasmettitore);
out4 Uscita digitale 3 (VDC per SSR);
dG2.c Ingresso digitale 2 (contatto pulito);
dG2.U
Ingresso digitale 2 (in tensione 12... 24 VDC)
.
Note: 1. Impostando [9] io3.F = dG2.C o dG2V, il parametro
[20] O3F viene mascherato e diventa visibile [12] diF2.
2. Impostando [9] io3F = on i parametri [20] O3F e
[12] diF2 verranno mascherati.
3. Impostando [9] io3F a on o a out3, lo strumento
forzerà [12] diF2 = nonE e, se [11] diF1 era stato
impostato a 20 o 21, verrà anche lui forzato a nonE.
4. Modificando [9] io3F = on in [9] io3F = Out 3 por-
terà [20] O3F ad essere visibile e uguale nonE.
[10] rEcS - Abilita ricette
(relazione - regolazione + velocità)
Disponibile:
Sempre.
Campo: no Regolazione e velocità sono indipendenti;
YES Una azione regolante e la velocità sono in
relazione;
Nota: Quando [10] rEcS e impostato a YES la selezione di un
Set Point automaticamente anche una velocità con il
seguente ruolo: SP1 + Sd.t1 (velocità o tempo 1),
SP2 + Sd.t2 (velocità o tempo 2), SP3 + Sd.t3 (velocità
o tempo 3), SP4 + Sd.t4 (velocità o tempo 4).
[11] diF1 - Funzione dell’ingresso digitale 1
Disponibile:
Sempre.
Campo: nonE Nessuna funzione;
AAc Reset Allarmi [stato];
ASi Riconoscimento Allarmi (ACK) [stato];
HoLd Hold del valore misurato [stato];
St.bY Modo Stand by [stato]. Quando il contatto è
chiuso lo strumento è in stand-by;
oPLo Modalità manuale;
HE.Co Azione riscaldante utilizza SP1, azione raf-
freddante utilizza SP2 [stato] (consultare le
“Note” dopo [12] - diF2);
Str.t Timer Run/Hold/Reset [transizione].
Una breve chiusura fa partire il timer e/o so-
spende l’esecuzione; la chiusura prolungata
(più di 10 secondi) esegue il reset del timer
;
t.run Timer Run [transizione]
una breve chiusura
del contatto fa partire il timer
;
t.rES Timer reset [transizione]
una breve chiusura
del contatto esegue il reset del timer
;
t.r.H Timer run/hold [stato]:
-
Contatto chiuso = Conteggio attivo (Run)
,
-
Contatto aperto = Conteggio sospeso (Hold);
t.r.r Timer run/reset [stato];
t.r.rb
Timer run/reset con “blocco” al termine del
conteggio (per far ripartire il timer lo strumen-
to deve ricevere il comando Run dalla porta
seriale o dall’ingresso digitale 2);
P.run Run del programma [transizione]. La prima
chiusura fa partire il programma, ma le chiu-
sure successive fanno ripartire l’esecuzione
del programma dall’inizio;
P.rES Reset del programma [transizione]. La chiu-
sura del contatto resetta l’esecuzione del
programma;
P.r.h.t Hold del programma [transizione]. La
prima chiusura sospende l’esecuzione del
programma mentre la seconda chiusura fa
continuare l’esecuzione del programma
;
P.r.h.S Run/Hold del programma [stato]. A contatto
chiuso il programma è in esecuzione;
P.r.r Run/Reset del programma [stato]
–Contatto chiuso - Programma in Run
–Contatto aperto - Reset del programma;
Sd.r.S Velocità/Tempo run/stop [stato]:
–Contatto chiuso - Run,
–Contatto aperto - Stop;
Sd.r.t Velocità/Tempo run/stop [transizione];
ch.SP
Selezione sequenziale del Set Point [transi-
zione]
(consultare le “Note” dopo [12] - diF2);
ch.Sd
Selezione sequenziale
Velocità [
transizione
];
SP.1.4 Selezione binaria del
Set Point
eseguita
tramite l’ingresso digitale 1 (bit meno signifi-
cativo) e l’ingresso digitale 2 (bit più signifi-
cativo)[stato];
Sd.1.4
Selezione binaria della Velocità eseguita trami-
te l’ingresso digitale 1 (bit meno significativo) e
l’ingresso digitale 2 (bit più significativo)[stato].
Note: 1. Quando [12] diF2 non è disponibile, le voci SP.1.4
e Sd.1.4 non sono visibili.
2. Quando [10] rEcS = YES (ricette abilitate):
• ch.SP, ch.Sd, SP.1.4 o Sd.1.4 selezionano la ricetta
[ricetta 1 = SP1 + Sd.t1 (velocità/tempo 1),
ricetta 2 = SP2 + Sd.t2 (velocità/tempo 2),
ricetta 3 = SP3 + Sd.t3 (velocità/tempo 3),
ricetta 4 = SP4 + Sd.t4 (velocità/tempo 4)];
• [52] n.SPd = Numero di velocità usate - Questo
parametro definisce il numero di ricette utilizzate
e forza anche il valore del parametro [84] nSP
(numero di Set Point disponibili);
• [84] nSP -
numero di Set Point usati - Questo
parametro definisce il numero di ricette utilizzate
e forza anche il valore del parametro [52] n.SPd
(numero di velocità disponibili)
;
• [57] A.Sd.t - Selezione velocità/tempo attiva -
Questo parametro definisce il numero di ricette
utilizzate e forza anche il valore del parametro
[91] A.SP - Selezione Set Point attivo;
• [91] A.SP - Selezione Set Point attivo - Questo
parametro definisce il numero di ricette utilizzate
e forza anche il valore del parametro
[57] A. Sd.t - Selezione velocità/tempo attiva.

Ascon Tecnologic - Serie K_7 - MANUALE INGEGNERISTICO - PAG. 13
[12] diF2 - Funzione dell’ingresso digitale 2
Disponibile: Quando [9] Io3.F = diG2.
Campo: nonE Nessuna funzione;
AAc Reset Allarmi [stato];
ASi Riconoscimento Allarmi (ACK) [stato];
HoLd Hold del valore misurato [stato];
St.bY Modo Stand by [stato]. Quando il contatto è
chiuso lo strumento è in stand-by;
oPLo Modalità manuale;
HE.Co Azione riscaldante utilizza SP1, azione raf-
freddante utilizza SP2 [stato] (vedere “Note
relative agli ingressi digitali”);
Str.t Timer Run/Hold/Reset [transizione].
Una breve chiusura fa partire il timer e/o so-
spende l’esecuzione; la chiusura prolungata
(più di 10 secondi) esegue il reset del timer
;
t.run Timer Run [transizione]
una breve chiusura
del contatto fa partire il timer
;
t.rES Timer reset [transizione]
una breve chiusura
del contatto esegue il reset del timer
;
t.r.H Timer run/hold [stato]:
-
Contatto chiuso = Conteggio attivo (Run)
,
-
Contatto aperto = Conteggio sospeso (Hold);
t.r.r Timer run/reset [stato];
t.r.rb
Timer run/reset con “blocco” al termine del
conteggio (per far ripartire il timer lo stru-
mento deve ricevere il comando RUNun dalla
porta seriale o dall’ingresso digitale 2);
P.run Run del programma [transizione]. La prima
chiusura fa partire il programma, ma le chiu-
sure successive fanno ripartire l’esecuzione
del programma dall’inizio;
P.rES Reset del programma [transizione]. La chiu-
sura del contatto resetta l’esecuzione del
programma;
P.r.h.t Hold del programma [transizione]. La
prima chiusura sospende l’esecuzione del
programma mentre la seconda chiusura fa
continuare l’esecuzione del programma
;
P.r.h.S Run/Hold del programma [stato]. A contatto
chiuso il programma è in esecuzione;
P.r.r Run/Reset del programma [stato]
–Contatto chiuso - Programma in Run,
–Contatto aperto - Reset del programma;
Sd.r.S Velocità/Tempo run/stop [stato]:
–Contatto chiuso - Run,
–Contatto aperto - Stop;
Sd.r.t Velocità/Tempo run/stop [transizione];
ch.SP
Selezione sequenziale del Set Point [transi-
zione]
(consultare le “Note” dopo [12] - diF2);
ch.Sd
Selezione sequenziale
Velocità [
transizione
];
SP.1.4 Selezione binaria del
Set Point
eseguita
tramite l’ingresso digitale 1 (bit meno signifi-
cativo) e l’ingresso digitale 2 (bit più signifi-
cativo)[stato];
Sd.1.4
Selezione binaria della Velocità eseguita trami-
te l’ingresso digitale 1 (bit meno significativo) e
l’ingresso digitale 2 (bit più significativo)[stato].
Note: 1. Quando [11] diF1 o [12] diF2 (es. diF1) sono
uguali a HE.Co lo strumento agisce come segue:
• A contatto aperto l’azione regolante è Riscal-
dante e il Set Point attivo è SP.
• A contatto aperto l’azione regolante è Raffred-
dante e il Set Point attivo è SP2
.
2. Quando [11] diF1 = SP.1.4, [12] diF2 è forzato a
SP.1.4 e non può eseguire altre funzioni.
3. Quando [11] diF1 = SP.1.4
e [12] diF2 = SP.1.4,
la
selezione del set point avviene come segue
:
Ingr. digitale 1 Ingr. digitale 2 Set Point operativo
Off Off Set Point 1
On Off Set Point 2
Off On Set Point 3
On On Set Point 4
4. Quando [11] diF1 =
Sd.1.4, [12] diF2
è forzato a
Sd.1.4
e non può eseguire altre funzioni.
5. Quando si utilizza la “Selezione del set point sequen-
ziale” (diF1 o diF2 = ch.SP), ogni chiusura del contat-
to aumenta di uno il numero di SPAt (set point attivo).
La selezione è ciclica
SP -> SP2 -> SP3 -> SP4
.
6. Quando [10] rEcS = YES (ricette abilitate):
• ch.SP, ch.Sd, SP.1.4 o Sd.1.4 selezionano la ricetta
[ricetta 1 = SP1 + Sd.t1 (velocità/tempo 1),
ricetta 2 = SP2 + Sd.t2 (velocità/tempo 2),
ricetta 3 = SP3 + Sd.t3 (velocità/tempo 3),
ricetta 4 = SP4 + Sd.t4 (velocità/tempo 4)];
• [52] n.SPd = Numero di velocità usate - Questo
parametro definisce il numero di ricette utilizzate
e forza anche il valore del parametro [84] nSP
(numero di Set Point disponibili);
• [84] nSP -
numero di Set Point usati - Questo
parametro definisce il numero di ricette utilizzate
e forza anche il valore del parametro [52] n.SPd
(numero di velocità disponibili)
;
• [57] A.Sd.t - Selezione velocità/tempo attiva -
Questo parametro definisce il numero di ricette
utilizzate e forza anche il valore del parametro
[91] A.SP - Selezione Set Point attivo;
• [91] A.SP - Selezione Set Point attivo - Questo
parametro definisce il numero di ricette utilizzate
e forza anche il valore del parametro
[57] A. Sd.t - Selezione velocità/tempo attiva.
[13] di.A - Azione degli ingressi digitali
Disponibile:
Sempre.
Campo: 0 DI1 azione diretta,
DI2 (se configurato) azione diretta;
1 DI1 azione inversa,
DI2 (se configurato) azione diretta;
2 DI1 azione diretta,
DI2 (se configurato) azione inversa;
3 DI1 azione inversa,
DI2(se configurato) azione inversa.
Gruppo ]out - Configurazione delle uscite
[14] o1.F - Funzione dell’uscita Out 1
Disponibile:
Sempre.
Campo: nonE Uscita non utilizzata. Con questa imposta-
zione lo stato di questa uscita può essere
impostato tramite interfaccia seriale;
H.rEG Uscita di riscaldamento;
c.rEG Uscita di raffreddamento;
AL Uscita di allarme;
t.out Uscita Timer;
t.HoF
Uscita Timer - l’uscita è OFF se Timer in Hold;
P.End Indicatore di programma in “end”;
P.HLd Indicatore di programma in “hold”;
P.uit Indicatore di programma in “wait”;

Ascon Tecnologic - Serie K_7 - MANUALE INGEGNERISTICO - PAG. 14
P.run Indicatore di programma in “run”;
P.Et1 Evento 1 del programma;
P.Et2 Evento 2 del programma;
or.bo Indicatore di fuori-campo o rottura sensore;
P.FAL Indicatore di mancata alimentazione;
bo.PF Indicatore di fuori-campo, rottura sensore
e/o mancata alimentazione;
St.By Indicatore di strumento in stand-by;
diF1
L’uscita ripete lo stato dell’ingresso digitale 1;
diF2
L’uscita ripete lo stato dell’ingresso digitale 2;
on Out 1 sempre ad ON;
riSP Richiesta di ispezione.
Note: 1. Quando due o più uscite sono programmate allo
stesso modo, le uscite verranno pilotate in parallelo.
2. La segnalazione di mancata alimentazione viene
cancellata quando lo strumento rileva un reset
degli allarmi eseguito tramite il tasto , tramite
ingresso digitale o tramite seriale.
3. Se non viene programmata nessuna uscita re-
golante, gli allarmi relativi (se presenti) verranno
forzati a nonE.
[15] o1.AL - Allarmi assegnati all’uscita Out 1
Disponibile:
Quando [14] o1F = AL.
Campo: 0... 63 con la regola seguente:
+1 Allarme 1;
+2 Allarme 2;
+4 Allarme 3;
+8 Allarme Loop break;
+16 Rottura sensore (burn out);
+32
Sovraccarico Out 3 (corto circuito su Out 3).
Esempio 1: Impostando 3 (2 + 1) l’uscita segnalerà l’allarme
1 e 2 (condizione di OR).
Esempio 2: Impostando Setting 13 (8 + 4 + 1) l’uscita se-
gnalerà l’allarme 1, l’allarme 3 e il loop break alarm.
[16] o1.Ac - Azione dell’uscita Out 1
Disponibile:
Quando [14] o1F è diverso da nonE.
Campo: dir Azione diretta;
rEU Azione inversa;
dir.r
Azione diretta con indicazione LED invertita;
rEU.r
Azione inversa con indicazione LED invertita
.
Note: 1. Azione diretta: l’uscita ripete lo stato della funzione
pilotante. Esempio: uscita di allarme con azione
diretta. Quando l’allarme è ON il relè è eccitato
(uscita logica a 1).
2. Azione inversa: lo stato dell’uscita è l’opposto del-
lo stato della funzione pilotante. Esempio
: uscita
di allarme con azione inversa. Quando l’allarme è
OFF il relè è eccitato (uscita logica a 1). Questa
impostazione è normalmente chiamata “fail-safe”
ed è normalmente utilizzata in processi pericolosi
in modo da generare un allarme quando lo stru-
mento è spento o scatta il watchdog interno.
[17] o2F - Funzione dell’uscita Out 2
Disponibile:
Quando lo strumento è dotato dell’uscita 2.
Campo: nonE Uscita non utilizzata. Con questa imposta-
zione lo stato di questa uscita può essere
impostato tramite interfaccia seriale;
H.rEG Uscita di riscaldamento;
c.rEG Uscita di raffreddamento;
AL Uscita di allarme;
t.out Uscita Timer;
t.HoF
Uscita Timer - l’uscita è OFF se Timer in Hold;
P.End Indicatore di programma in “end”;
P.HLd Indicatore di programma in “hold”;
P.uit Indicatore di programma in “wait”;
P.run Indicatore di programma in “run”;
P.Et1 Evento 1 del programma;
P.Et2 Evento 2 del programma;
or.bo Indicatore di fuori-campo o rottura sensore;
P.FAL Indicatore di mancata alimentazione;
bo.PF Indicatore di fuori-campo, rottura sensore
e/o mancata alimentazione;
St.By Indicatore di strumento in stand-by;
diF1
L’uscita ripete lo stato dell’ingresso digitale 1;
diF2
L’uscita ripete lo stato dell’ingresso digitale 2;
on Out 2 sempre ad ON;
riSP Richiesta di ispezione.
Per ulteriori dettagli, si veda il parametro [14] O1F.
m
In caso di controllo servomotore devono essere
utilizzate le uscite 2 e 3, entrambe impostate con la
funzione di riscaldamento o raffreddamento (o2F = o3F
= HrEG oppure o2F = o3F =crEG); il parametro [56]
cont deve essere impostato a 3pt.
[18] o2.AL - Allarmi assegnati all’uscita Out 2
Disponibile:
Quando [17] o2F = AL.
Campo: 0... 63 con la regola seguente:
+1 Allarme 1;
+2 Allarme 2;
+4 Allarme 3;
+8 Allarme Loop break;
+16 Rottura sensore (burn out);
+32
Sovraccarico Out 3 (corto circuito su Out 3).
Per ulteriori dettagli, si veda il parametro [15] o1.AL.
[19] o2.Ac - Azione dell’uscita Out 2
Disponibile:
Quando [17] o2F è diverso da nonE.
Campo: dir Azione diretta;
rEU Azione inversa;
dir.r
Azione diretta con indicazione LED invertita;
rEU.r
Azione inversa con indicazione LED invertita
.
Per ulteriori dettagli, si veda il parametro [16] o1.Ac.
[20] o3F - Funzione dell’uscita Out 3
Disponibile:
Quando [9] Io3F = Out 3.
Campo: nonE Uscita non utilizzata. Con questa imposta-
zione lo stato di questa uscita può essere
impostato tramite interfaccia seriale;
H.rEG Uscita di riscaldamento;
c.rEG Uscita di raffreddamento;
AL Uscita di allarme;
t.out Uscita Timer;
t.HoF
Uscita Timer - l’uscita è OFF se Timer in Hold;
P.End Indicatore di programma in “end”;
P.HLd Indicatore di programma in “hold”;
P.uit Indicatore di programma in “wait”;
P.run Indicatore di programma in “run”;
P.Et1 Evento 1 del programma;
P.Et2 Evento 2 del programma;
or.bo Indicatore di fuori-campo o rottura sensore;
P.FAL Indicatore di mancata alimentazione;
bo.PF Indicatore di fuori-campo, rottura sensore
e/o mancata alimentazione;
St.By Indicatore di strumento in stand-by.
Per ulteriori dettagli, si veda il parametro [14] O1F.

Ascon Tecnologic - Serie K_7 - MANUALE INGEGNERISTICO - PAG. 15
[21] o3.AL - Allarmi assegnati all’uscita Out 3
Disponibile:
Quando [9] Io3F = Out3 e [20] o3F = AL.
Campo: 0... 63 con la regola seguente:
+1 Allarme 1;
+2 Allarme 2;
+4 Allarme 3;
+8 Allarme Loop break;
+16 Rottura sensore (burn out);
+32
Sovraccarico Out 3 (corto circuito su Out 3).
Per ulteriori dettagli, si veda il parametro [15] o1.AL.
[22] o3Ac - Out 3 action
Disponibile:
Quando [9] Io3F = Out3 e [20] o3F sono diversi
da nonE.
Campo: dir Azione diretta;
rEU Azione inversa;
dir.r
Azione diretta con indicazione LED invertita;
rEU.r
Azione inversa con indicazione LED invertita
.
Per ulteriori dettagli, si veda il parametro [16] o1.Ac.
Gruppo ]AL1 - Parametri Allarme 1
[23] AL1t - Tipo Allarme 1
Disponibile:
Sempre.
Campo: • Una o più uscite sono programmate come uscite
regolanti.
nonE Allarme non utilizzato;
LoAb Allarme assoluto di minima;
HiAb Allarme assoluto di massima;
LHAo Allarme di banda assoluto con indicazione
di allarme di fuori banda;
LHAi Allarme di banda assoluto con indicazione
di allarme in banda;
SE.br Rottura sensore;
LodE Allarme di minima in deviazione (relativo);
HidE Allarme di massima in deviazione (relativo);
LHdo Allarme di banda relativa con indicazione di
allarme di fuori banda;
LHdi Allarme di banda relativo con indicazione di
allarme in banda.
• Nessuna uscita è impostata come uscita regolante:
nonE Allarme non utilizzato;
LoAb Allarme assoluto di minima;
HiAb Allarme assoluto di massima;
LHAo Allarme di banda assoluto con indicazione
di allarme di fuori banda;
LHAi Allarme di banda assoluto con indicazione
di allarme in banda;
SE.br Rottura sensore.
Note: 1. Gli allarmi relativi e di deviazione sono riferiti al set
point operativo dello strumento.
LoAb
OUT
AL1
AL1
PV
HAL1
time
HiAb
OUT
AL1
AL1
PV
HAL1
time
LHAb
PV
AL1H HAL1
time
offoffoff
LHde
OUT
AL1
AL1L HAL1
PV
AL1H
SP
HAL1
time
OUT
AL1
-AL1L HAL1
ON ON
offoffoff ON ON
offoffoff ON ON
offoffoff ON ON
2. L’allarme di rottura sensore (SE.br) verrà attivato
quando il display visualizza ----.
[24] Ab1 - Funzione dell’Allarme 1
Disponibile:
Quando [23] AL1t è diverso da nonE.
Campo: 0... 15 con la seguente regola:
+1
Non attiva all’accensione (mascherato);
+2
Allarme memorizzato (riarmo manuale);
+4
Allarme tacitabile;
+8 Allarme relativo non attivo al cambio di set point.
Esempio: Impostando Ab1 uguale a 5 (1+4) l’allarme 1
risulterà non attivo all’accensione e riconoscibile.
Note: 1. La selezione “non attivo all’accensione” consente
di inibire l’allarme all’accensione dello strumento o
quando lo strumento rileva il passaggio:
• Da Modo manuale (oPLo) ad automatico
• Da Modo Stand-by ad automatico.
L’allarme verrà automaticamente attivato quando il
valore misurato raggiunge per la prima volta il suo
valore di soglia ±l’isteresi (in altre parole quando
la condizione iniziale di allarme scompare).
PWR ON
AL1
PV time
offoff
Ab1 = +1
Ab1 = +0
offoff
ON ON
ON
2. Un allarme memorizzato (reset manuale) è un
allarme che rimane attivo anche quando la con-
dizione di allarme che lo ha generato non è più
presente. Il reset dell’allarme può avvenire solo
tramite un comando esterno (tasto , ingresso
logico o interfaccia seriale).
Alarm reset Alarm reset
AL1
PV time
offoff
Ab1 = +2
Ab1 = +0
offoff ON
ON
3. Un allarme tacitabile è un allarme che può essere
resettato anche se la condizione che ha generato
l’allarme è ancora presente. Il riconoscimento dell’al-
larme può avvenire solo tramite un comando esterno
(tasto , ingresso logico o interfaccia seriale).
Alarm ACK Alarm ACK
AL1
PV
time
offoff
Ab1 = +4
Ab1 = +0
offoff off
ON ON
ON
4. Un allarme relativo non attivo al cambio di set
point è un allarme che risulta mascherato dopo
un cambio di set point fino a che il processo non
raggiunge la sua soglia ±l’isteresi.
Sp2
Sp1
PV
time
Ab1 = +8
Ab1 = +0
ON offoff
AL1
offoffoff
AL1
ON
ON
ON
ON
5. Lo strumento non memorizza in EEPROM lo stato
degli allarmi. Pertanto, lo stato degli allarmi verrà
perso quando non c’è tensione.

Ascon Tecnologic - Serie K_7 - MANUALE INGEGNERISTICO - PAG. 16
[25] AL1L -
Per allarmi di massima e minima, AL1L
è
il limite inferiore del parametro AL1
- Per gli allarmi di banda, AL1L è la
soglia inferiore dell’allarme
Disponibile:
Quando [23] AL1t è diverso da nonE o
[23] AL1t è diverso da SE.br.
Campo: Da -1999 a [26] AL1H in unità ingegneristiche.
[26] AL1H -
Per allarmi di massima e minima, AL1H
è il limite superiore del parametro AL1
- Per gli allarmi di banda, AL1H è la
soglia superiore dell’allarme
Disponibile:
Quando [23] AL1t è diverso da nonE o
[23] AL1 è diverso da SE.br.
Campo: Da [25] AL1L a 9999 in unità ingegneristiche
[27] AL1- Soglia di allarme Allarme 1
Disponibile:
Quando:
[23] AL1t = LoAb - Allarme assoluto di minima;
[23] AL1t = HiAb - Allarme assoluto di massima;
[23] AL1t = LodE - Deviazione verso il basso (relativo);
[23] AL1t = HIdE - Deviazione verso l’alto (relativo).
Campo: Da [25] AL1L a [26] AL1H in unità ingegneristiche.
[28] HAL1 - Isteresi Allarme 1
Disponibile:
Quando [23] AL1t è diverso da nonE o
[23] AL1 è diverso da SE.br.
Campo: 1... 9999 in unità ingegneristiche.
Note: 1. Il valore di isteresi è la differenza tra soglia di allarme
e punto in cui l’allarme si riarmerà automaticamente.
2. Quando la soglia di allarme più o meno l’isteresi
viene impostata fuori dal campo di misura, lo stru-
mento non sarà in grado di resettare l’allarme.
Esempio: Campo di ingresso 0... 1000 (mbar).
–Set point = 900 (mbar);
–Allarme in deviazione verso il basso = 50 (mbar);
–Isteresi = 160 (mbar). Il punto di reset risulterebbe pari a:
900 - 50 + 160 = 1010 (mbar) ma il valore è fuori campo.
Il reset può essere fatto solo spegnendo lo strumento e
riaccendendolo dopo che la condizione che lo ha generato
è stata rimossa.
3. Tutti gli allarmi di banda utilizzano la stessa istere-
si per entrambe le soglie.
4. Quando l’isteresi di un allarme di banda è più
larga della banda programmata, lo strumento non
sarà in grado di resettare l’allarme.
Esempio: Campo di ingresso = 0... 500 (°C).
–Set point = 250 (°C);
–Allarme di banda relativo;
–Soglia di allarme inferiore = 10 (°C);
–Soglia di allarme superiore = 10 (°C);
–Isteresi = 25 (°C).
[29] AL1d - Ritardo Allarme 1
Disponibile:
Quando [23] AL1t è diverso da nonE.
Campo: oFF nessun ritardo
1... 9999 secondi.
Nota: L’allarme verrà attivato solo se la condizione di allarme
persiste per un tempo maggiore di [29] AL1d mentre il
reset è immediato.
[30] AL1o - Abilitazione Allarme 1 durante il modo
stand-by e le indicazioni di fuori campo
Disponibile:
Quando [23] AL1t is different from nonE.
Campo: 0 Mai;
1 Durante lo stand by;
2 Durante il fuori campo alto o basso;
3 Durante il fuori campo alto/basso e lo stand by
.
Gruppo ]AL2 - Parametri Allarme 2
[31] AL2t - Tipo Allarme 2 type
Disponibile:
Sempre.
Campo: • Una o più uscite sono programmate come uscite
regolanti.
nonE Allarme non utilizzato;
LoAb Allarme assoluto di minima;
HiAb Allarme assoluto di massima;
LHAo Allarme di banda assoluto con indicazione
di allarme di fuori banda;
LHAi Allarme di banda assoluto con indicazione
di allarme in banda;
SE.br Rottura sensore;
LodE Allarme di minima in deviazione (relativo);
HidE Allarme di massima in deviazione (relativo);
LHdo Allarme di banda relativa con indicazione di
allarme di fuori banda;
LHdi Allarme di banda relativo con indicazione di
allarme in banda.
• Nessuna uscita è impostata come uscita regolante:
nonE Allarme non utilizzato;
LoAb Allarme assoluto di minima;
HiAb Allarme assoluto di massima;
LHAo Allarme di banda assoluto con indicazione
di allarme di fuori banda;
LHAi Allarme di banda assoluto con indicazione
di allarme in banda;
SE.br Rottura sensore.
Nota: Gli allarmi relativi sono riferiti al set point operativo
(questo può essere differente dal Set point di destina-
zione se si utilizza una rampa al Set point).
[32] Ab2 - Funzione dell’Allarme 2
Disponibile:
Quando [31] AL2t è diverso da nonE.
Campo: 0... 15 con la seguente regola:
+1
Non attiva all’accensione (mascherato);
+2
Allarme memorizzato (riarmo manuale);
+4
Allarme tacitabile;
+8 Allarme relativo non attivo al cambio di set point.
Esempio: Impostando Ab2 uguale a 5 (1+4) l’allarme 2
risulterà “non attivo all’accensione” e “tacitabile”.
Nota: Per ulteriori dettagli vedere il parametro [23] Ab1.
[33] AL2L - Per allarmi di massima e minima, AL2L
è il limite inferiore del parametro AL2
- Per gli allarmi di banda, AL2L è la
soglia inferiore dell’allarme
Disponibile:
Quando [31] AL2t è diverso da nonE o
[31] AL2t è diverso da SE.br.
Campo: Da -1999 [34] AL2H in unità ingegneristiche.

Ascon Tecnologic - Serie K_7 - MANUALE INGEGNERISTICO - PAG. 17
[34] AL2H
- Per allarmi di massima e minima, AL2H
è il limite superiore del parametro AL2
-
Per gli allarmi di banda, AL2H è la soglia
superiore dell’allarme
Disponibile:
Quando [31] AL2t è diverso da nonE o
[31] AL2t è diverso da SE.br.
Campo: Da [33] AL2L a 9999 in unità ingegneristiche.
[35] AL2 - Soglia di allarme Allarme 2
Disponibile:
Quando:
[31] AL2t = LoAb - Allarme assoluto di minima;
[31] AL2t = HiAb - Allarme assoluto di massima;
[31] AL2t = LodE - Deviazione verso il basso (relativo);
[31] AL2t = HIdE - Deviazione verso l’alto (relativo).
Campo: Da [33] AL2L a [34] AL2H in unità ingegneristiche.
[36] HAL2 - Isteresi Allarme 2
Disponibile:
Quando [31] AL2t è diverso da nonE o
[31] AL2t è diverso da SE.br.
Campo: 1... 9999 in unità ingegneristiche.
Nota: Per ulteriori informazioni si veda il parametro [28] HAL1
.
[37] AL2d - Ritardo Allarme 2
Disponibile:
Quando [31] AL2t è diverso da nonE.
Campo: oFF Nessun ritardo;
1... 9999 secondi.
Nota: L’allarme verrà attivato solo se la condizione di allarme
persiste per un tempo maggiore di [37] AL2d mentre il
reset è immediato.
[38] AL2o - Abilitazione Allarme 2 durante il modo
stand-by e le indicazioni di fuori campo
Disponibile:
Quando [31] AL2t è diverso da nonE o
[31] AL2t è diverso da SE.br.
Campo: 0 Mai;
1 Durante lo stand by;
2 Durante il fuori campo alto o basso;
3 Durante il fuori campo alto/basso e lo stand by.
Gruppo ]AL3 - Parametri Allarme 3
[39] AL3t - Tipo Allarme 3
Disponibile:
Sempre.
Campo: • Una o più uscite sono programmate come uscite
regolanti.
nonE Allarme non utilizzato;
LoAb Allarme assoluto di minima;
HiAb Allarme assoluto di massima;
LHAo Allarme di banda assoluto con indicazione
di allarme di fuori banda;
LHAi Allarme di banda assoluto con indicazione
di allarme in banda;
SE.br Rottura sensore;
LodE Allarme di minima in deviazione (relativo);
HidE Allarme di massima in deviazione (relativo);
LHdo Allarme di banda relativa con indicazione di
allarme di fuori banda;
LHdi Allarme di banda relativo con indicazione di
allarme in banda.
• Nessuna uscita è impostata come uscita regolante:
nonE Allarme non utilizzato;
LoAb Allarme assoluto di minima;
HiAb Allarme assoluto di massima;
LHAo Allarme di banda assoluto con indicazione
di allarme di fuori banda;
LHAi Allarme di banda assoluto con indicazione
di allarme in banda;
SE.br Rottura sensore.
Nota: Gli allarmi relativi sono riferiti al set point operativo
(questo può essere differente dal Set point di destina-
zione se si utilizza una rampa al Set point).
[40] Ab3 - Funzione dell’Allarme 3
Disponibile:
Quando [39] AL3t è diverso da nonE.
Campo: 0... 15 con la seguente regola:
+1
Non attiva all’accensione (mascherato);
+2
Allarme memorizzato (riarmo manuale);
+4
Allarme tacitabile;
+8 Allarme relativo non attivo al cambio di set point
.
Esempio: Impostando Ad3 uguale a 5 (1+4) l’allarme 3
risulterà “non attivo all’accensione” e “tacitabile”.
Nota: Per ulteriori informazioni si veda il parametro
[24] Ab1.
[41] AL3L - Per allarmi di massima e minima, AL3L
è il limite inferiore del parametro AL3
-
Per gli allarmi di banda, AL3L è la
soglia
inferiore dell’allarme
Disponibile:
Quando [39] AL3t è diverso da nonE o
[39] AL3t è diverso da SE.br.
Campo: Da -1999 a [42] AL3H in unità ingegneristiche.
[42] AL3H - Per allarmi di massima e minima, AL3H
è il limite superiore del parametro AL3
-
Per gli allarmi di banda, AL3H è la soglia
superiore dell’allarme
Disponibile:
Quando [39] AL3t è diverso da nonE o
[39] AL3t è diverso da SE.br.
Campo: Da [41] AL3L a 9999 in unità ingegneristiche..
[43] AL3 - Soglia di allarme Allarme 3
Disponibile:
Quando:
[39] AL3t = LoAb - Allarme assoluto di minima;
[39] AL3t = HiAb - Allarme assoluto di massima;
[
39] AL3t = LodE - Deviazione verso il basso (relativo);
[39] AL3t = HIdE - Deviazione verso l’alto (relativo).
Campo: Da [41] AL3L a [42] AL3H in unità ingegneristiche.
[44] HAL3 - Isteresi Allarme 3
Disponibile:
Quando [39] AL3t è diverso da nonE o
[39] AL3t è diverso da SE.br.
Campo: 1... 9999 in unità ingegneristiche
Nota: Per ulteriori informazioni si veda il parametro [28] HAL1
[45] AL3d - Ritardo Allarme 3
Disponibile:
Quando [39] AL3t è diverso da nonE.
Campo: oFF Nessun ritardo;
1... 9999 secondi.
Nota: L’allarme verrà attivato solo se la condizione di allarme
persiste per un tempo maggiore di [45] AL3d mentre il
reset è immediato.
[46] AL3o - Abilitazione Allarme 3 durante il modo
stand-by e le indicazioni di fuori campo
Disponibile:
Quando [39] AL3t è diverso da nonE o
[39] AL3t è diverso da SE.br.
Campo: 0 Mai;
1 Durante lo stand by;
2 Durante il fuori campo alto o basso;
3 Durante il fuori campo alto/basso e lo stand by.

Ascon Tecnologic - Serie K_7 - MANUALE INGEGNERISTICO - PAG. 18
Gruppo ]SPEd - Controllo Velocità
[47] SPd.P - Funzionamento dell’uscita Speed
all’accensione (Speed al Power ON)
Disponibile:
Sempre.
Campo: AS.Pr Parte alla stessa velocità che aveva allo
spegnimento;
OFF.A Parte con velocità zero (0) in attesa di un
comando di Start (da tastiera, Ingresso
digitale o comunicazione seriale);
OFF.b
Parte con velocità zero (0) e attende fino a
che la variabile controllata raggiunge il valore
SP + SPd.b (si veda il parametro che segue).
[48] SPd.b - Banda di abilitazione controllo della
Velocità (Speed band)
Disponibile:
Quando [47] SPd.P = OFF.b.
Campo: 1... 9999 unità ingegneristiche.
Nota: Quando [47] SPd.P = OFF.b la banda di abilitazione
è sempre attiva. In altre parole se la variabile control-
lata esce dalla banda programmata, l’uscita Speed
viene posta a zero (0) fino a che la variabile controlla-
ta non ritorna nella banda impostata.
[49] SPd.t - Unità ingegneristica della variabile
Velocità/Tempo
Disponibile:
Sempre.
Campo: PErc Vidualizzato come %;
tinE Vidualizzato come tempo;
E.U. Vidualizzato come unità ingegneristiche
(km/h , m/s, l/min).
[50] Sd.dF - Numero di cifre decimali variabile Velocità
Disponibile:
Quando [49] SPd.t è diverso da PErc.
Campo: 0... 3.
[51] SPd.r - Velocità di riferimento -
Imposta il tempo o la velocità rilevata
quando l’uscita al 100%
Disponibile:
Quando [49] SPd.t è diverso da PErc.
Campo: • Se [49] Spd.t = Perc il parametro è mascherato;
• Se [49] Spd.t = tinE: 00.01...99.59 (mm.ss);
• Se [49] Spd.t = E.U.: 0... 9999 E.U..
Note: 1. La differenza tra l’indicazione del tempo e le altre
(velocità, flusso ecc.) è:
Tempo Il valore assegnato a [51] SPd.r è il
tempo minimo e i valori assegnati a [53]
Sd.t1, [54]Sd.t2, [55]Sd.t3 e [56]Sd.t4
devono essere maggiori di [51] SPd.r;
E.U. l valore assegnato a [51] SPd.r è la
velocità massima e i valori assegnati a
[53] Sd.t1, [54]Sd.t2, [55]Sd.t3 e [56]Sd.t4
devono essere minori di [51] SPd.r.
2. Questa uscita può essere considerata come un’u-
scita lineare dove l’inizio scala è sempre 0 (motore
fermo) mentre il fondo scala è la velocità massima
(in unità ingegneristiche) o il tempo minimo (rile-
vato quando il motore funziona al 100%). La cifra
decimale consente di definire l’unità ingegneristica;
3. Quando si utilizza l’autocalibrazione (parametro
[58] Sd.cA) il tempo misurato dallo strumento ver-
rà memorizzato in questo parametro ([51] SPd.r).
[52] n.SPd - Numero di Velocità/Tempi utilizzati
Disponibile:
Sempre.
Campo: 1... 4.
Nota: Quando vengono utilizzate le ricette ([10] rEcS = YES),
il numero di velocità/tempo utilizzati [52] n.SPd defi-
nirà il numero di ricette utilizzate e imporrà il valore di
[84] nSP - numero di SP utilizzati.
[53] Sd.t1 - Velocità/Tempo 1
Disponibile:
Sempre.
Campo: • Quando [49] Spd.t = Perc, 0... 100%;
• Quando [49] Spd.t = tinE, 00.01... 99.59 (mm.ss);
• Quando [49] Spd.t = E.U., 0... 9999 E.U..
[54] Sd.t2 - Velocità/Tempo 2
Disponibile:
Sempre.
Campo: • Quando [49] Spd.t = Perc, 0... 100%;
• Quando [49] Spd.t = tinE, 00.01... 99.59 (mm.ss);
• Quando [49] Spd.t = E.U., 0... 9999 E.U..
[55] Sd.t3 - Velocità/Tempo 3
Disponibile:
Sempre.
Campo: • Quando [49] Spd.t = Perc, 0... 100%;
• Quando [49] Spd.t = tinE, 00.01... 99.59 (mm.ss);
• Quando [49] Spd.t = E.U., 0... 9999 E.U..
[56] Sd.t4 - Velocità/Tempo 4
Disponibile:
Sempre.
Campo: • Quando [49] Spd.t = Perc, 0... 100%;
• Quando [49] Spd.t = tinE, 00.01... 99.59 (mm.ss);
• Quando [49] Spd.t = E.U., 0... 9999 E.U..
[57] A.Sd.t - Velocità/Tempo attivo
Disponibile:
Sempre.
Campo: • Sd.t1;
• Sd.t2;
• Sd.t3;
• Sd.t4.
Nota: Quando vengono utilizzate le ricette ([10] rEcS = YES):
• [57] A.Sd.t (= velocità/tempo attivo) definisce la ricetta
in uso e forza il valore di [91] A.SP - Set Point attivo;
• [91] A.SP (= Set Point attivo) definisce la ricetta in uso
e forza il valore di [57] A. Sd.t (velocità/tempo attivo).
[58] Sd.cA - Calibrazione Velocità -
Auto-calibrazione Tempo minimo
Disponibile:
Quando [49] SPd.t è uguale a tinE.
Campo: YES Calibrazione abilitata:
no Nessuna calibrazione.
Come utilizzare il sistema di “Calibrazione Velocità”:
1. Inpostare [58] Sd.cA, il display inferiore vuisualizza no;
2. Premere il tasto , Il display inferiore visualizza YES (se
il nastro trasportatore si sta muovendo, viene fermato e il
loop di regolazione passa automaticamente in stand-by);
3. Porre un oggetto (utilizzato come riferimento) all’inizio
della “zona calda”;
4. Premere il tasto ; il nastro trasportatore inizia al 50%
della velocità e il display inferiore mostra On;
5. Quando l’oggetto di riferimento esce dalla “zona calda”,
premere nuovamente il tasto . Il display inferiore
visualizza End e il doppio del tempo misurato è momoriz-
zato nel parametro [51] SPd.r - Velocità di riferimento;
6. Nel caso fosse necessario abortire la calibrazione della
velocità in corso, premere il tasto , il parametro
[51] SPd.r - Velocità di riferimento - non verrà modificato
e lo strumento tornerà a visualizzare il Gruppo SPEd.

Ascon Tecnologic - Serie K_7 - MANUALE INGEGNERISTICO - PAG. 19
Gruppo ]LbA - Configurazione della funzione
allarme loop break
Note generali relative all’Allarme LBA
L’Allarme LBA opera come segue: quando si applica il 100%
di potenza ad un processo, dopo un tempo che dipende
dall’inerzia, la variabile misurata comincerà a variare in una
direzione conosciuta (aumenterà per un riscaldamento o a
diminuirà per un raffreddamento).
Esempio: Se applico il 100% di potenza ad un forno la
temperatura deve aumentare altrimenti uno o più elementi
del loop sono malfunzionanti (elemento riscaldante, sensore,
alimentazione, fusibile ecc.).
La stessa filosofia può essere applicata alla potenza minima.
Nel nostro esempio, se tolgo potenza al forno, la temperatu-
ra deve cominciare ad abbassarsi altrimenti l’SSR è in corto
circuito, la valvola è bloccata, ecc..
La funzione LBA si abilita automaticamente quando il PID
richiede la massima o la minima potenza.
Se la risposta del processo risulta più lenta della velocità
programmata, lo strumento attiva l’allarme.
Note: 1. Quando lo strumento è in modo manuale la fun-
zione LBA è disabilitata.
2. Quando l’allarme LBA è attivo lo strumento con-
tinua ad eseguire il controllo. Se la risposta del
processo dovesse rientrare nei limiti impostati, lo
strumento cancellerà automaticamente l’allarme.
3. Questa funzione è disponibile solo quando l’algo-
ritmo regolante è di tipo PID (Cont = PID).
[59] LbAt - Tempo della funzione LBA
Disponibile:
Quando [63] Cont = PID.
Campo: oFF = LBA non usato;
1... 9999 secondi.
[60] LbSt - Delta di misura utilizzato da LBA
quando è attiva la funzione Soft start
Disponibile:
Quando [59] LbAt è diverso da oFF.
Campo: oFF = La funzione LBA è inibita durante il soft start;
1... 9999 in unità ingegneristiche.
[61] LbAS - Delta di misura utilizzato da LBA
(loop break alarm step)
Disponibile:
Quando [59] LbAt è diverso da oFF.
Campo: 1... 9999 in unità ingegneristiche.
[62] LbcA - Condizioni di abilitazione LBA
Disponibile:
Quando [59] LbAt è diverso da oFF.
Campo: uP Abilitato se il PID richiede la potenza max.;
dn Abilitato se il PID richiede la potenza min.;
both
Abilitato in entrambi i casi (sia quando il PID
richiede la massima potenza sia quando
richiede la minima potenza).
Esempio di applicazione dell’Allarme LBA:
LbAt (tempo LBA) = 120 secondi (2 minuti)
LbAS (delta LBA) = 5°C
La macchina è stata progettata per raggiungere 200°C in 20
minuti (20°C/min).
Quando il PID richiede il 100% di potenza, lo strumento attiva
il conteggio del tempo. Durante il conteggio, se il valore misu-
rato aumenta più di 5°C, lo strumento fa ripartire il conteggio
del tempo. Altrimenti , se la variabile misurata non raggiunge il
delta prefissato, (5°C in 2 minuti) lo strumento genera l’allarme.
Gruppo ]rEG - Parametri di regolazione
Il gruppo rEG sarà disponibile solo se una o più uscite sono
programmate come uscite regolanti (H.rEG o C.rEG).
[63] cont - Tipo di controllo
Disponibile:
Quando almeno un’uscita è programmata come
uscita regolante (H.rEG o C.rEG).
Campo: • Quando sono state programmate due azioni rego-
lanti (H.rEG e c.rEG):
Pid PID (riscalda e raffredda);
nr Controllo ON/OFF a zona neutra (riscalda e
raffredda).
HSEt
HSEt
SP
PV
time
OUTH.rEG
(heating)
OUTc.rEG
(cooling)
off
off off
ON
ON ON
• Quando è stata programmata una sola azione
regolante (H.rEG o c.rEG):
Pid PID (riscalda e raffredda);
On.FA ON/OFF con isteresi asimmetrica;
On.FS ON/OFF con isteresi simmetrica;
3Pt Controllo servomotore (disponibile quando
le uscite Out 2 e Out 3 sono stati ordinate
come “M”).
HEAt - On.FA
OUT
H.rEG
SP
PV
HSEt
time
off off
CooL -On.FA
OUT
C.rEG
SP
PV
HSEt
time
ON ONON off off
ON ONON
OUT
H.rEG
SP HSEt
HSEt
time
OUT
H.rEG
SP
HSEt
HSEt
time
off off
ON ONON off off
ON ONON
PV
PV
HEAt - On.FS
CooL -On.FS
Note: 1. Controllo ON/OFF con isteresi asimmetrica:
• OFF quando PV > SP;
• ON quando PV < (SP - isteresi).
2. Controllo ON/OFF con isteresi simmetrica:
• OFF quando PV > (SP + isteresi);
• ON quando PV < (SP - isteresi).
[64] Auto - Selezione Autotuning
Ascon Tecnologic ha sviluppato tre tipi di Autotuning:
–Autotuning oscillatorio;
–Autotuning Fast;
–EvoTune.
1. L’ Autotuning oscillatorio è quello classico e:
• È più accurato;
• Parte anche quando la misura è vicina al set point;
• Può essere utilizzato anche quando il set point è
vicino alla temperatura ambiente.
2. L’ Autotuning Fast è consigliabile quando:
• Il processo è molto lento e si desidera essere opera-
tivi in breve tempo;
• Quando un overshoot non è ammesso;
• In molte macchine multiloop dove l’autotuning Fast
riduce gli errori dovuti all’influenza reciproca dei loop.
3. L’ Autotuning EvoTune è consigliabile quando:
• Non si hanno informazioni circa il processo;

Ascon Tecnologic - Serie K_7 - MANUALE INGEGNERISTICO - PAG. 20
• Non si hanno informazioni circa l’abilità dell’utente;
• Si desidera effettuare il calcolo dell’Autotune in modo
indipendente dalle condizioni di partenza (es. cambio
del set point durante l’esecuzione dell’autotune, ecc.).
Nota: L’ Autotuning Fast può partire soltanto quando il valo-
re misurato (PV) è inferiore a (SP + 1/2SP).
Disponibile:
Quando [63] cont = PID
Campo: -4... 8 dove:
-4 Autotuning oscillatorio con partenza automatica
all’accensione (dopo il soft start) è dopo ogni
cambio di set point;
-3 Autotuning oscillatorio con partenza manuale;
-2 Autotuning oscillatorio con partenza automatica
alla prima accensione soltanto;
-1 Autotuning oscillatorio con partenza automatica
a tutte le accensioni;
0 Non utilizzato;
1 Autotuning Fast con partenza automatica a
tutte le accensioni;
2 Autotuning Fast con partenza automatica alla
prima accensione soltanto;
3 Autotuning Fast con partenza manuale;
4 Autotuning Fast con partenza automatica all’ac-
censione (dopo il soft start) è dopo ogni cambio
di set point;
5 EvoTune con ripartenza automatica a tutte le
accensioni;
6 EvoTune con partenza automatica alla prima
accensione soltanto;
7 EvoTune con partenza manuale;
8 EvoTune con ripartenza automatica a tutti i
cambi di set point.
Nota: Tutti le forme di autotune sono inibite durante l’esecu-
zione di un programma.
[65] tunE - Attivazione manuale dell’Autotuning
Disponibile:
Quando [63] cont = PID.
Campo: oFF Lo strumento non sta eseguendo l’Autotuning;
on Lo strumento sta eseguendo l’Autotuning.
[66] HSEt - Isteresi della regolazione ON/OFF
Disponibile:
Quando [63] cont è diverso da PID.
Campo: 0... 9999 in unità ingegneristiche.
[67] cPdt - Tempo di protezione del compressore
Disponibile:
Quando [63] cont = nr.
Campo: OFF Protezione disabilitata;
1... 9999 secondi.
[68] Pb - Banda proporzionale
Disponibile:
Quando [63] cont = PiD.
Campo: 1... 9999 in unità ingegneristiche.
Nota: La funzione Autotune calcola questo valore.
[69] ti - Tempo integrale
Disponibile:
Quando [63] cont = PID.
Campo: OFF Azione integrale esclusa;
1... 9999 secondi;
inF Azione integrale esclusa.
Nota: La funzione Autotuning calcola questo valore.
[70] td - Tempo derivativo
Disponibile:
Quando [63] cont = PID.
Campo: oFF Azione derivativa esclusa;
1... 9999 secondi.
Nota: La funzione Autotuning calcola questo valore.
[71] Fuoc - Fuzzy overshoot control
Questo parametro riduce l’overshoot normalmente presente
dopo una partenza a freddo o dopo un cambio di set point e
risulta attivo solo in questi due casi.
Impostando un valore tra 0.00... 1.00 è possibile ridurre l’a-
zione dello strumento durante l’avvicinamento al set point.
Impostando Fuoc = 1 questa funzione è disabilitata.
PV
SP
time
21
3
Disponibile:
Quando [56] cont = PID.
Campo: 0... 2.00.
Nota: Autotuning di tipo Fast calcola il valore del parametro
Fuoc mentre quello oscillatorio lo pone uguale a 0.5.
[72] tcH - Tempo di ciclo dell’uscita riscaldante
Disponibile:
Quando almeno un’uscita è programmata come
uscita riscaldante (H.rEG) e [63] cont = PID.
Disponibile:
0.2... 130.0 secondi.
[73] rcG -
Rapporto di potenza tra l’azione di ri-
scaldamento e quella di raffreddamento
(guadagno relativo freddo)
Lo strumento usa, per il raffreddamento, gli stessi parametri
PID impostati per il riscaldamento, ma l’efficienza delle due
azioni è normalmente diversa.
Questo parametro consente
di definire il rapporto tra l’efficacia dell’azione riscaldante
rispetto a quella raffreddante.
Un esempio ci aiuterà a spiegarne la filosofia:
Consideriamo un loop di un estrusore per plastica, la tempe-
ratura di lavoro (SP) è 250°C. Quando vogliamo aumentare la
temperatura da 250... 270°C (D 20°C) utilizzando il 100% della
potenza riscaldante, abbiamo bisogno di 60 s per raggiungere il
nuovo valore. Al contrario, quando usiamo il 100% della poten-
za
raffreddante (ventola) per portare la temperatura da
250... 270°C
(D 20°C), ci bastano 20 s.
Nel nostro esempio il rapporto è a 60/20 = 3 ([61] PrAt = 3)
e
questo rapporto ci dice che l’azione di raffreddamento è 3 volte
più efficace di quella di riscaldamento.
Disponibile: Quando sono state impostate due azioni regolanti
(H.rEG e c.rEG) e [63] cont = PID.
Campo: 0.01... 99.9.
Nota: La funzione Autotuning calcola questo valore.
[74] tcc - Tempo di ciclo dell’uscita raffreddante
Disponibile:
Quando almeno un’uscita è programmata come
uscita raffreddante (c.rEG) e [63] cont = PID.
Campo: 0.2... 130.0 secondi.
[75] rS - Reset manuale (precarica dell’integrale)
Consente di ridurre drasticamente gli undershoot dovuti a
partenze a caldo. Quando il processo è a regime, lo stru-
mento opera con una potenza di uscita stabile (es. 30%).
In caso di breve caduta di tensione, il processo riparte con
una variabile misurata uguale al set point mentre lo strumen-
to parte con una azione integrale pari a zero.
Impostando un reset manuale pari al valore medio della
potenza a regime (nel nostro esempio 30%) lo strumento
riparte con una potenza pari al valore medio (invece di zero)
e la variazione diverrà molto piccola (in teoria nulla).
Disponibile:
Quando [63] cont = PID.
Campo: -100.0... +100.0%.
La pagina sta caricando ...
La pagina sta caricando ...
La pagina sta caricando ...
La pagina sta caricando ...
La pagina sta caricando ...
La pagina sta caricando ...
La pagina sta caricando ...
La pagina sta caricando ...
La pagina sta caricando ...
La pagina sta caricando ...
La pagina sta caricando ...
La pagina sta caricando ...
La pagina sta caricando ...
La pagina sta caricando ...
La pagina sta caricando ...
La pagina sta caricando ...
La pagina sta caricando ...
La pagina sta caricando ...
La pagina sta caricando ...
La pagina sta caricando ...
La pagina sta caricando ...
La pagina sta caricando ...
La pagina sta caricando ...
La pagina sta caricando ...
La pagina sta caricando ...
La pagina sta caricando ...
La pagina sta caricando ...
La pagina sta caricando ...
La pagina sta caricando ...
La pagina sta caricando ...
La pagina sta caricando ...
La pagina sta caricando ...
-
 1
1
-
 2
2
-
 3
3
-
 4
4
-
 5
5
-
 6
6
-
 7
7
-
 8
8
-
 9
9
-
 10
10
-
 11
11
-
 12
12
-
 13
13
-
 14
14
-
 15
15
-
 16
16
-
 17
17
-
 18
18
-
 19
19
-
 20
20
-
 21
21
-
 22
22
-
 23
23
-
 24
24
-
 25
25
-
 26
26
-
 27
27
-
 28
28
-
 29
29
-
 30
30
-
 31
31
-
 32
32
-
 33
33
-
 34
34
-
 35
35
-
 36
36
-
 37
37
-
 38
38
-
 39
39
-
 40
40
-
 41
41
-
 42
42
-
 43
43
-
 44
44
-
 45
45
-
 46
46
-
 47
47
-
 48
48
-
 49
49
-
 50
50
-
 51
51
-
 52
52




















































Ascon tecnologic KM7 Manuale del proprietario
- Tipo
- Manuale del proprietario
Documenti correlati
-
Ascon tecnologic KX5 Manuale del proprietario
-
-
-
-
-
-
-
-
Ascon tecnologic KM2 Manuale del proprietario
-